5.3.1. Асинхронні двигуни
Асинхронні двигуни збуджуються змінним струмом.
Асинхронні двигуни поділяють на безколекторні (основний тип) та колекторні.
Асинхронні безколекторні двигуни випускаються у двох основних виконаннях: двигун із короткозамкненим ротором, двигун із фазним ротором (з контактними кільцями).
Незалежно від типу, будь-який двигун змінного струму складається з двох частин: нерухомої частини (називається статор) і рухомої (обертової) частини (називається ротор).
За числом фаз двигуни змінного струму бувають: трифазні, двофазні та однофазні.
Позитивні якості асинхронних двигунів: простота і дешевина, надійність у роботі, достатньо високий ККД.
Недоліки асинхронних двигунів: споживання індуктивного струму, який, намагнічуючи статор, призводить до зниження cosφ мережі; неможливість плавного регулювання частоти обертання вала в широких межах (існують електронні засоби регулювання частоти обертання вала двигуна шляхом зміни частоти змінного струму, але вони достатньо складні і коштують дорого); погані пускові характеристики у двигунів із короткозамкненим ротором.
Створення магнітного поля, що обертається. Однією із переваг трифазного струму є його здатність створювати магнітне поле, що обертається.
Нехай три однакові нерухомі котушки АХ, BY, CZ розташовані на внутрішній поверхні сталевого циліндра (статора) і з’єднані зіркою (рис. 5.27).
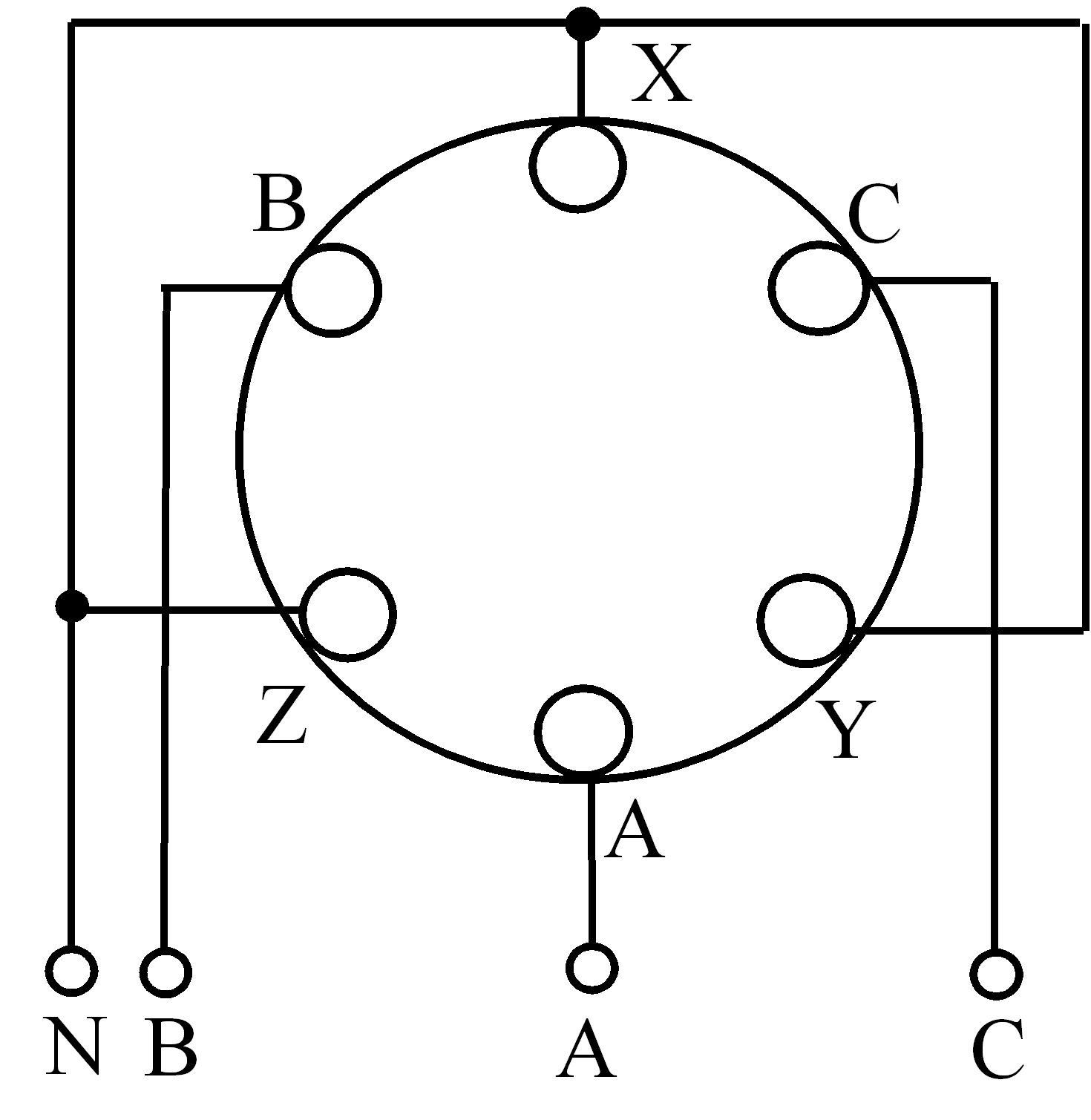
Рис. 5.27 – З’єднання обмоток статора "зіркою"
По котушках проходять струми трифазної системи, графіки яких приведені на рис. 5.28. Приймемо за позитивний напрямок струму струм від початку до кінця котушки і знайдемо дійсні напрямки струмів у кожній котушці для декількох моментів часу а, б, в, г, д, е, ж. Наприклад, у момент (а) струм у другій котушці відсутній; струм у першій котушці має позитивний напрямок і тому на початку котушки (А) спрямований від спостерігача; струм у третій котушці має негативний напрямок і на початку котушки (С) спрямований до спостерігача (рис. 5.29).
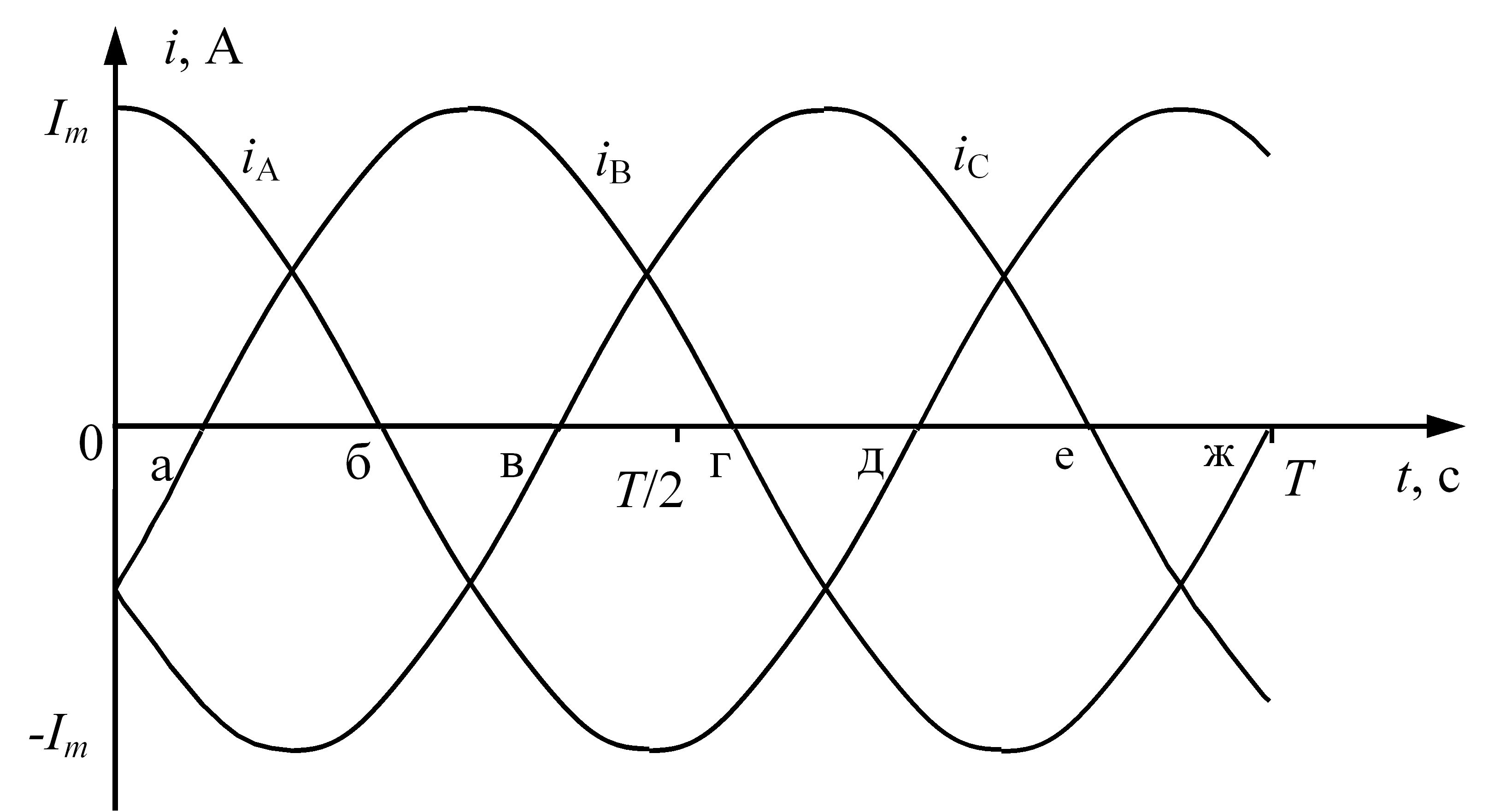
Рис. 5.28 – Струми обмоток статора при з’єднанні їх "зіркою"
Побудувавши лінії магнітної індукції, що охоплюють однаково спрямовані струми, для всіх обраних моментів часу, можна побачити, що напрямок сумарного магнітного потоку змінюється. Сумарний магнітний потік обертається за напрямком руху годинникової стрілки і робить протягом періоду одне обертання.
Якщо змінити порядок приєднання двох будь-яких котушок трифазної мережі, то напрямок обертання магнітного поля зміниться на протилежний.
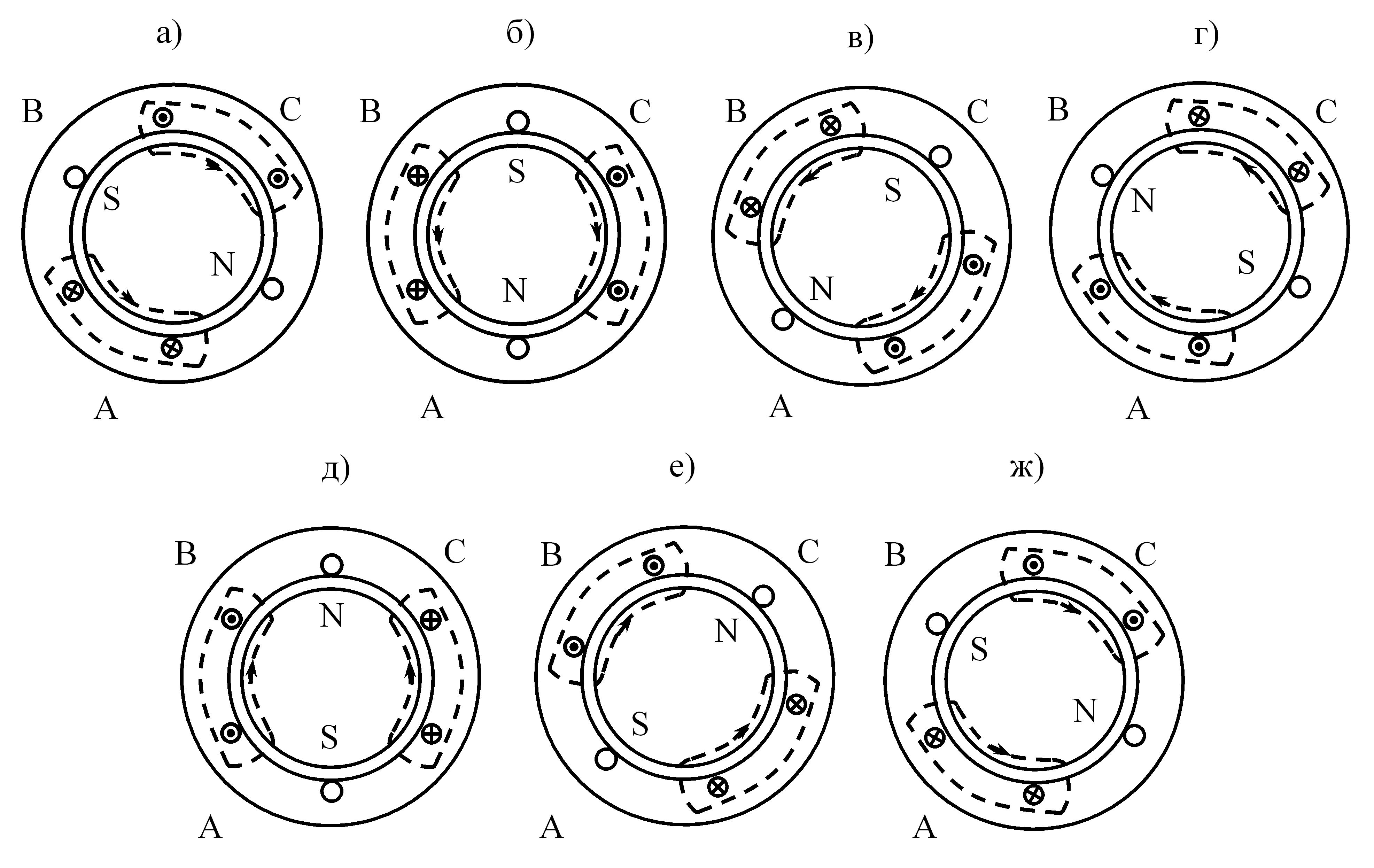
Рис. 5.29 – Створення магнітного поля, що обертається, у різні моменти часу
Таким чином, трифазний струм, проходячи по трьох котушках статора, зсунутих у просторі на кут 120º, створює постійне за величиною, але обертове магнітне поле.
За час, який дорівнює одному періоду, магнітний потік робить одне обертання, а за f1 періодів магнітний потік зробить n1 обертів у секунду (або f1 ⋅ 60 періодів у хвилину):
 (5.61)
(5.61)
де n1 – синхронна швидкість (швидкість обертання магнітного поля статора), [об/хв]; f1 – частота струму в обмотці статора, [Гц]; p – число пар полюсів статора.
Швидкість обертання магнітного поля статора обернено пропорційна числу пар полюсів. Наприклад, при f1 = 50 Гц, p = 1:  ; при f1 = 50 Гц, p = 2: n1 = 1500 об/хв.
; при f1 = 50 Гц, p = 2: n1 = 1500 об/хв.
Конструкція та принцип дії трифазного асинхронного електродвигуна. Трифазний асинхронний електродвигун має дві основні частини (рис. 5.30): ротор (частина, що обертається) і статор (нерухома частина). Зазор між статором і ротором виконується мінімально можливим (0,3÷0,5 мм у двигунів малої потужності, 1÷1,5 мм у двигунів великої потужності). Це пояснюється тим, що статор і ротор пов’язані між собою тільки електромагнітно, тому чим менше зазор, тим краще цей зв’язок і тим вище ККД двигуна.
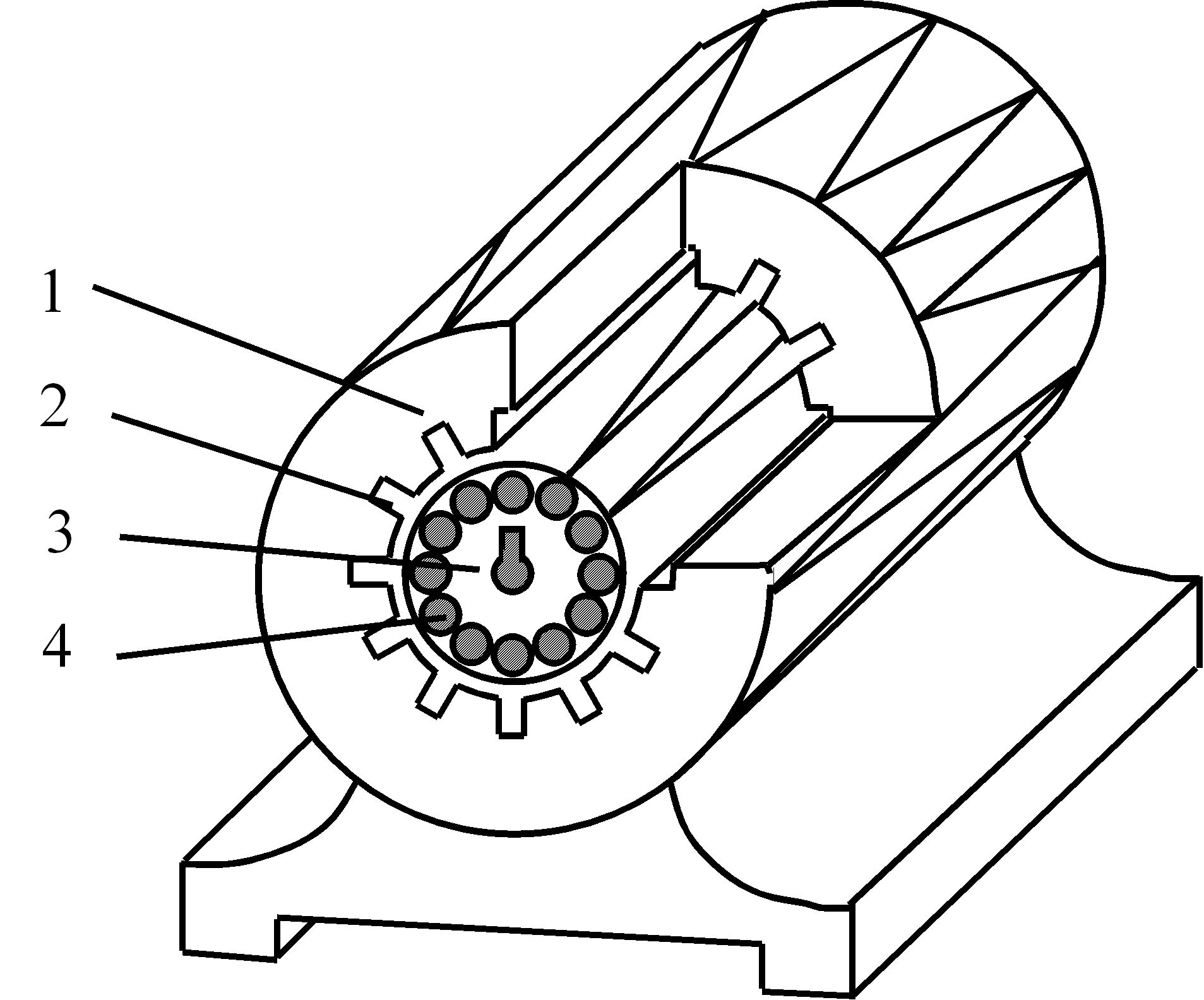
Рис. 5.30 – Конструкція трифазного асинхронного електродвигуна
1 – корпус статора; 2 – пази осердя статора; 3 – осердя ротора;
4 – обмотка ротора
Статор складається з корпуса 1, в який запресоване осердя з пазами 2. В пазах осердя розміщена трифазна обмотка. Кінці обмотки виведені у клемну коробку. Для приєднання до мережі живлення обмотки статора можуть з’єднуватися "зіркою" або "трикутником". Найбільший обертальний момент на валу двигуна утворюється при з’єднанні обмоток "трикутником".
Ротор складається з осердя 3, насадженого на вал, і обмоток 4. Обмотки укладаються в пази осердя. Залежно від конструкції обмотки ротори поділяються на короткозамкнені та з фазною обмоткою.
Частіше застосовуються короткозамкнені ротори, в яких у пазах осердя розміщені мідні або алюмінієві стрижні, що замикаються накоротко мідними або алюмінієвими кільцями на торцях. Обмотка створює клітку, так зване "біляче колесо" (рис. 5.31,а).
Фазний (рис. 5.31,б) ротор має три фазні обмотки, кінці яких з’єднані разом, а початки прикріплені до ізольованих мідних кілець, укріплених на валу (три кільця). До кілець притиснуті щітки. Це дозволяє розмикати коло ротора, замикати його накоротко та вмикати в нього пусковий реостат. Для зменшення зносу і втрат на тертя деякі двигуни з пусковим реостатом мають пристрої для підйому щіток і замикання обмоток ротора накоротко після пуску двигуна.
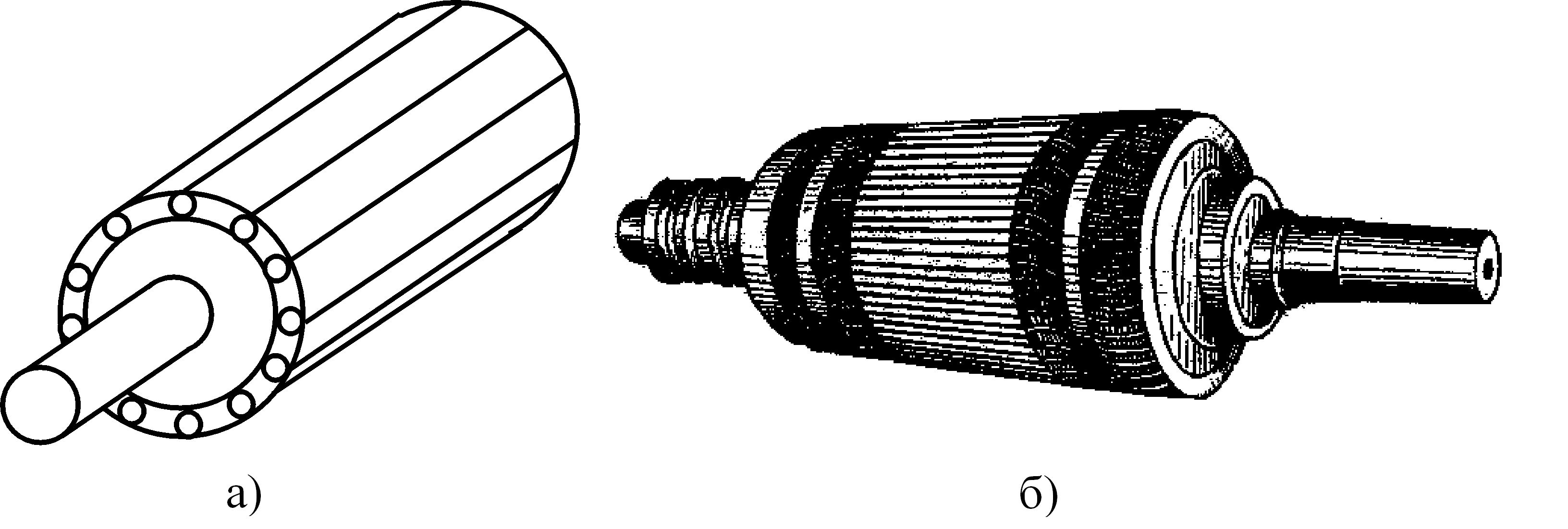
Рис. 5.31 – Конструкція роторів трифазних асинхронних двигунів:
а – короткозамкненого, б – фазного
Принцип дії трифазного асинхронного електродвигуна базується на явищі обертового магнітного поля (рис. 5.32).
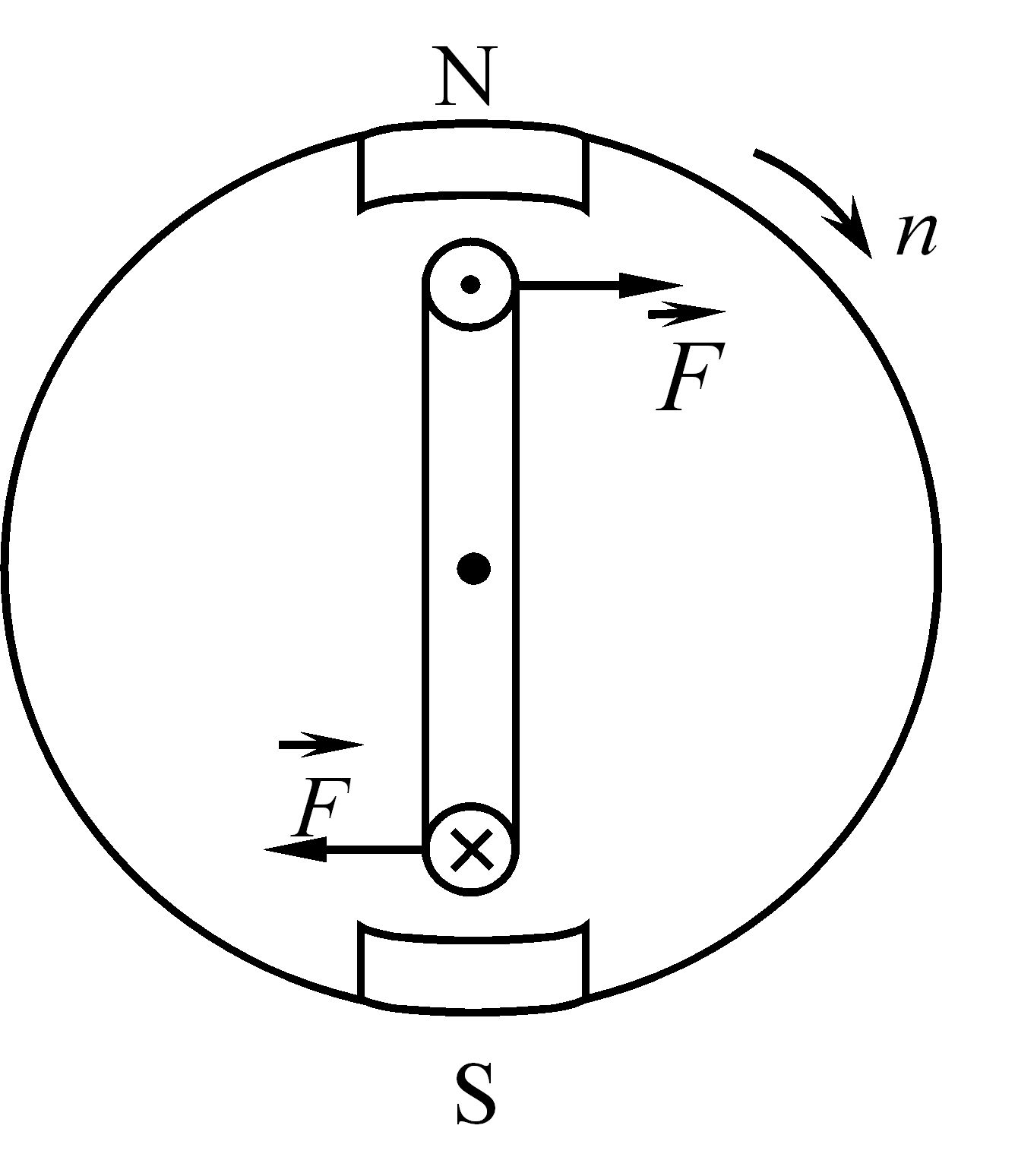
Рис. 5.32 – Принцип дії трифазного асинхронного двигуна
Обертове магнітне поле статора перетинає провідники обмотки ротора і наводить у них ЕРС, а оскільки провідники замкнуті, то в них виникає струм. Струм у провідниках обмотки ротора утворює власне магнітне поле, яке вступає у взаємодію з обертовим магнітним полем статора, внаслідок чого ротор починає обертатися слідом за обертовим полем статора. Зі зростанням швидкості обертання ротора зменшується швидкість, з якою провідники ротора перетинаються магнітними лініями. Якби ротор досяг тієї самої швидкості обертання, що й магнітний потік статора, то перетинання провідників взагалі не відбувалося б, і струм у роторі став би дорівнювати нулю. Але за відсутності струму в роторі обертальний момент також дорівнював би нулю. Отже, за наявності гальмуючого моменту магнітний потік і ротор не можуть обертатися з тією самою швидкістю, що і потік статора (синхронно). Швидкість обертання ротора завжди є дещо меншою. Тому двигуни такого типу і називаються "асинхронними" (тобто несинхронними).
Основні параметри трифазного асинхронного електродвигуна. При аналізі роботи трифазного асинхронного двигуна визначають наступні параметри: ковзання, частота ЕРС (струму) в обмотці ротора, ЕРС статора, ЕРС ротора, опір обмотки ротора, сила струму обмотки ротора, електромагнітний момент, обертальний момент, потужність, ККД, частота обертання вала ротора.
Домовимося, що надалі усі величини, що відносяться до статора, позначатимуться індексом 1, до ротора – індексом 2 відповідно.
Раніше було введено швидкість обертання магнітного поля статора (синхронна швидкість) n1 (формула (5.61)). Позначимо швидкість обертання вала ротора (асинхронна швидкість) n2.
Ковзання (позначається латинською літерою s; безрозмірна величина) – відношення швидкості обертання магнітного поля відносно ротора до синхронної швидкості n1:
 . (5.62)
. (5.62)
Очевидно, що при s = 1 вал двигуна не обертається, а при s → 0 швидкість обертання вала ротора n2 наближається до синхронної швидкості n1. Чим вище навантаження на валу, тим більше величина s. За номінального навантаження звичайно s = 0,02 ÷ 0,06.
Магнітне поле статора обертається зі швидкістю n1, що визначається формулою (5.61). Швидкість обертання вала ротора залежить від режиму роботи двигуна. Припустимо, що ротор нерухомий (n2 = 0), тоді поле статора обертається відносно нерухомого ротора зі швидкістю:
 . (5.63)
. (5.63)
Відповідно до цієї швидкості в обмотці ротора наводиться ЕРС (виникає струм). З формул (5.61) та (5.63) випливає вираз для визначення частоти ЕРС (струму) в обмотці ротора:
![]() , (5.64)
, (5.64)
де позначено ![]() – частота струму в обмотці ротора.
– частота струму в обмотці ротора.
![]() . (5.65)
. (5.65)
Наприклад, за частоти струму в обмотці статора f1 = 50 Гц та ковзанні s = 0,02 частота струму в обмотці ротора дорівнює f2 = f1 ⋅ s = 50 ⋅ 0,02 = 1 Гц.
Магнітний потік статора, обертаючись у просторі з постійною синхронною швидкістю, індукує у кожній з фаз статорної і роторної обмоток ЕРС E1 та E2 відповідно.
ЕРС однієї фази обмотки статора визначається подібно ЕРС первинної обмотки трансформатора (формула (5.4)):
![]() (5.66)
(5.66)
де w1 – число послідовно з’єднаних витків обмотки статора; f1 – частота струму в обмотці статора, [Гц]; Фm – магнітний потік статора (амплітудне значення), [Вб]; k1 – обмотувальний коефіцієнт статора.
ЕРС нерухомої (n2 = 0) обмотки ротору визначається аналогічно:
![]() (5.67)
(5.67)
де w2 – число послідовно з’єднаних витків обмотки ротора; k2 – обмотувальний коефіцієнт ротора.
ЕРС рухомої (n2 ≠ 0) обмотки ротору визначається за формулою:
![]() (5.68)
(5.68)
де f2 = f1 ⋅ s – частота струму в обмотці ротора.
Тому можна записати наступне співвідношення між ЕРС рухомої та ЕРС нерухомої обмоток ротору:
![]() . (5.69)
. (5.69)
ЕРС, яка наводиться в роторі, що обертається, дорівнює ЕРС, що наводиться у нерухомому роторі, помноженій на ковзання.
Опір короткозамкненої обмотки ротора. Обмотка ротора має повний опір Z2, який складається з активного r2 та індуктивного XL2 опорів. Зв’язок між Z2, r2 та XL2 визначається формулою (3.54):
![]() . (5.70)
. (5.70)
Активний опір обмотки ротора r2 не залежить від частоти. Індуктивний опір обмотки ротора залежить від частоти за формулою (3.33).
Індуктивний опір обмотки ротора, що є нерухомим, дорівнює:
![]() , [Ом], (5.71)
, [Ом], (5.71)
де ω1 – кутова частота струму в обмотці статора, [рад/c]; f1 – циклічна частота струму в обмотці статора, [Гц]; L2 – індуктивність фази обмотки ротора, [Гн].
Індуктивний опір ротора, що обертається:
![]() , [Ом], (5.72)
, [Ом], (5.72)
де ω2 – кутова частота струму в обмотці ротора, [рад/c]; f2 – циклічна частота струму в обмотці ротора, [Гц].
З урахуванням формули (5.65) можна записати наступне:
![]() . (5.73)
. (5.73)
Тоді повний опір обмотки ротора, що обертається, визначається за формулою:
![]() , [Ом]. (5.74)
, [Ом]. (5.74)
Сила струму короткозамкненої обмотки ротора. Запишімо закон Ома з урахуванням формул (5.69) та (5.74):
 . (5.75)
. (5.75)
З формули (5.75) видно, що у момент пуску (s = 1) сила струму I2 є максимальною. Реально пусковий струм трифазного асинхронного двигуна перевищує номінальний струм у 6÷8 разів.
При роботі двигуна під навантаженням зі збільшенням навантаження на валу швидкість обертання вала ротора зменшується, а ковзання збільшується. Відповідно до формули (5.75) збільшується й величина струму I2.
Електромагнітний момент. Запишімо рівняння енергетичного балансу для трифазного асинхронного двигуна:
![]() , (5.76)
, (5.76)
де P1 – потужність, що надходить у статор двигуна із мережі;
P2 – корисна потужність на валу двигуна;
Pел1 – потужність електричних втрат в обмотці статора;
Pмагн1 – потужність магнітних втрат у статорі;
Pел2 – потужність електричних втрат в обмотці ротора;
Pмагн2 – потужність магнітних втрат у роторі;
Pмех.вт – потужність механічних втрат у підшипниках.
Знаючи, що частота f2 є малою (декілька герц), вважаємо Pмагн2 → 0.
Позначаємо:
Pем = P1 – Pел1 – Pмагн1 – електромагнітна потужність, що надходить у ротор;
Pмех = P2 + Pмех.вт – механічна потужність на валу ротора.
Тоді формула (5.76) набуває виду:
![]() . (5.77)
. (5.77)
Застосовуємо відому формулу для механічної потужності на валу:
Р = М ⋅ ω, (5.78)
де P – потужність, [Вт]; М – момент, [Н∙м]; ω – кутова частота, [рад/с].
На основі формули (5.78) запишемо вираз для електромагнітної потужності, що надходить у ротор:
![]() (5.79)
(5.79)
та механічної потужності на валу ротора:
![]() , (5.80)
, (5.80)
де Ме – електромагнітний момент, [Н∙м]; М – обертальний момент, [Н∙м]; ω1 – кутова частота струму в обмотці статора, [рад/c]; ω2 – кутова частота струму в обмотці ротора, [рад/c].
Електромагнітний момент Ме пов’язаний з обертальним моментом М (корисним моментом на валу) наступною формулою:
![]() . (5.81)
. (5.81)
де М0 – момент втрат.
Якщо припустити, що М0 = 0, то Ме ≈ М
Потужність електричних втрат в обмотці ротора Pел2 визначається за формулою:
![]() , (5.82)
, (5.82)
де m2 – кількість фаз обмотки ротора (для трифазного двигуна m2 = 3); E2 – ЕРС рухомої обмотки ротора, [B]; I2 – сила струму в обмотці ротора, [А]; Ψ2 – кут зсуву фаз між ЕРС та струмом ротора.
У формулу (5.77) підставляємо формули (5.79), (5.80), (5.82); припустимо Ме ≈ М та отримуємо співвідношення:
![]() . (5.83)
. (5.83)
Враховуючи формулу (5.68) та те, що кутова частота ω та швидкість обертання n пов’язані співвідношенням ![]() , перетворюємо формулу (5.83) та отримуємо проміжну формулу:
, перетворюємо формулу (5.83) та отримуємо проміжну формулу:
![]() ,
,
з якої випливає вираз для електромагнітного (обертального) моменту:
 , (5.84)
, (5.84)
де позначено  – стала двигуна, яка визначається лише його конструктивними особливостями.
– стала двигуна, яка визначається лише його конструктивними особливостями.
Таким чином, електромагнітний момент є пропорційним магнітному потоку та силі струму ротора.
У формулі (5.84) від ковзання s залежать параметри сила струму I2 (формула (5.75)) та cos Ψ2 (за аналогією з формулою (3.52)  ). Після підстановки з формули (5.84) отримуємо теоретичну залежність обертального моменту від ковзання M = f (s):
). Після підстановки з формули (5.84) отримуємо теоретичну залежність обертального моменту від ковзання M = f (s):
 . (5.85)
. (5.85)
Аналіз формули (5.85) показує, що при малих ковзаннях обертальний момент збільшується пропорційно ковзанню. За значного збільшення ковзання обертальний момент зменшується.
Зразковий вид залежності обертального моменту M від ковзання s (M = f (s)) при 0 ≤ s ≤ 1 подано на рис. 5.33.
Коефіцієнт корисної дії. Вираз для ККД асинхронного двигуна отримуємо за допомогою формул (1.9) та (5.76):
 (5.86)
(5.86)
Потужність P1, що надходить у статор двигуна із мережі, визначається за формулою:
![]() , [Вт], (5.87)
, [Вт], (5.87)
де m1 – кількість фаз обмотки статора (для трифазного двигуна m1 = 3); U1 – напруга мережі живлення, [B]; I1 – сила струму, що споживається обмоткою статора з мережі, [А]; φ1 – кут зсуву фаз між напругою та струмом статора.
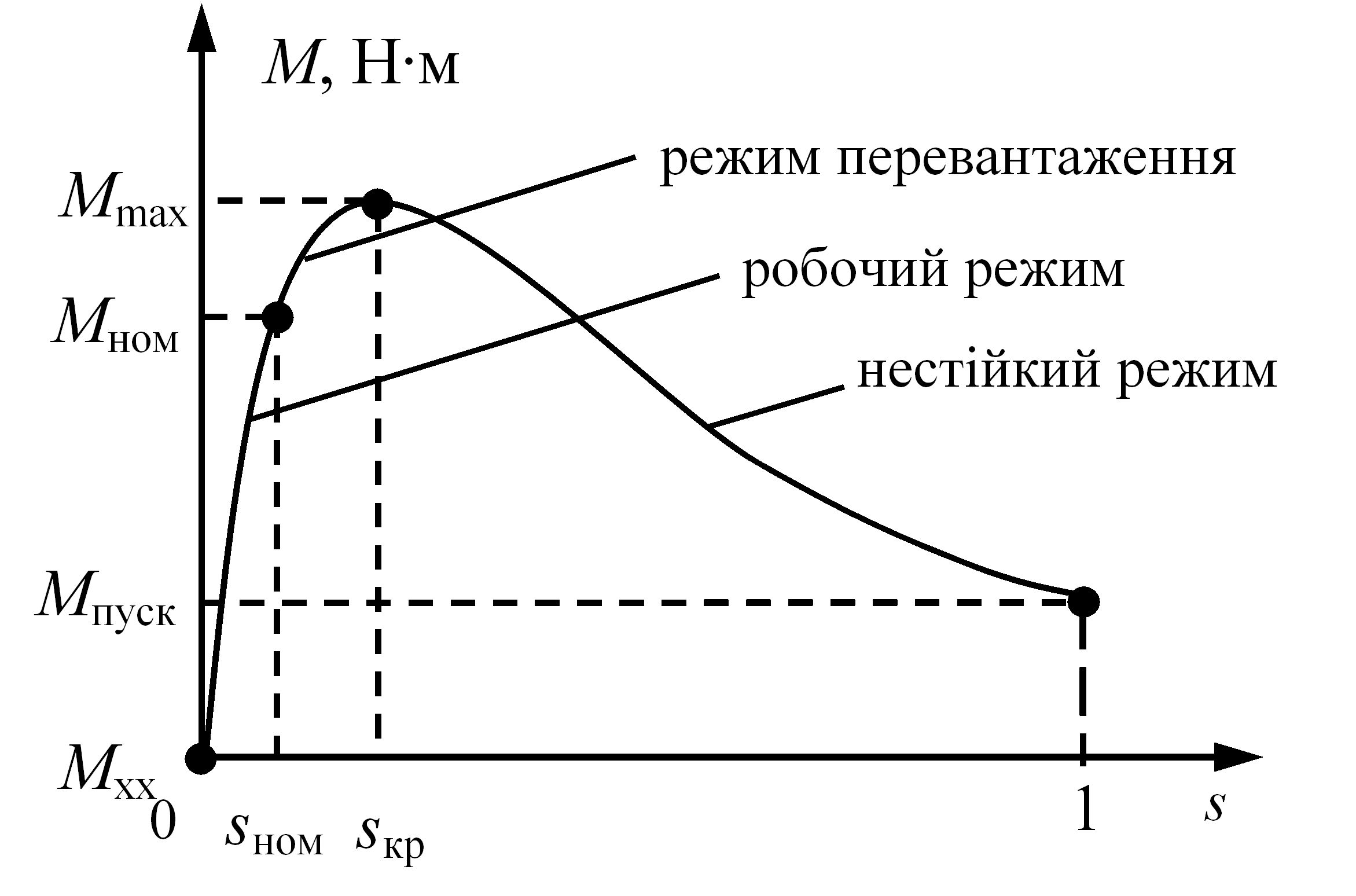
Рис. 5.33 – Зразковий вид залежності обертального моменту M від ковзання s
Тоді формула (5.86) набуває наступного виду:
 . (5.88)
. (5.88)
Аналіз формули (5.86) дозволяє зробити висновок, що чим більшим є коефіцієнт потужності cos φ1 , тим вище ККД двигуна. Реально параметр cos φ1 знаходиться в межах 0,7÷0,9, ККД сягає значення 80÷90 %. Асинхронний двигун проектується таким чином, щоб максимум ККД досягався за навантаження, дещо меншого за номінальне.
Основні характеристики трифазного асинхронного електродвигуна. Основними характеристиками трифазного асинхронного двигуна є:
- механічна характеристика – залежність швидкості обертання вала ротора n2 від моменту M навантаження на валу: n2 = f (M). Зразковий вид механічної характеристики подано на рис. 5.34,а;

Рис. 5.34 – Зразковий вид характеристик трифазного асинхронного двигуна:
а – механічна характеристика, б – робочі характеристики
- робочі характеристики (визначаються за сталих напруги на статорі U1 = const та частоти f1 = const):
– залежність швидкості обертання вала ротора n2 від корисної потужності на валу P2: n2 = f(P2);
– залежність обертального моменту M від корисної потужності на валу P2: M = f(P2);
– залежність коефіцієнта потужності cosφ1 від корисної потужності на валу P2: cosφ1 = f(P2);
– залежність ККД η від корисної потужності на валу P2: η = f(P2);
– залежність сили струму I1, що споживається двигуном, від корисної потужності на валу P2: I1 = f(P2);
– залежність ковзання s від корисної потужності на валу P2: s = f(P2).
Зразковий вид робочих характеристик подано на рис. 5.34,б.
Умовні позначення трифазних асинхронних двигунів на електричних схемах подано на рис. 5.35.
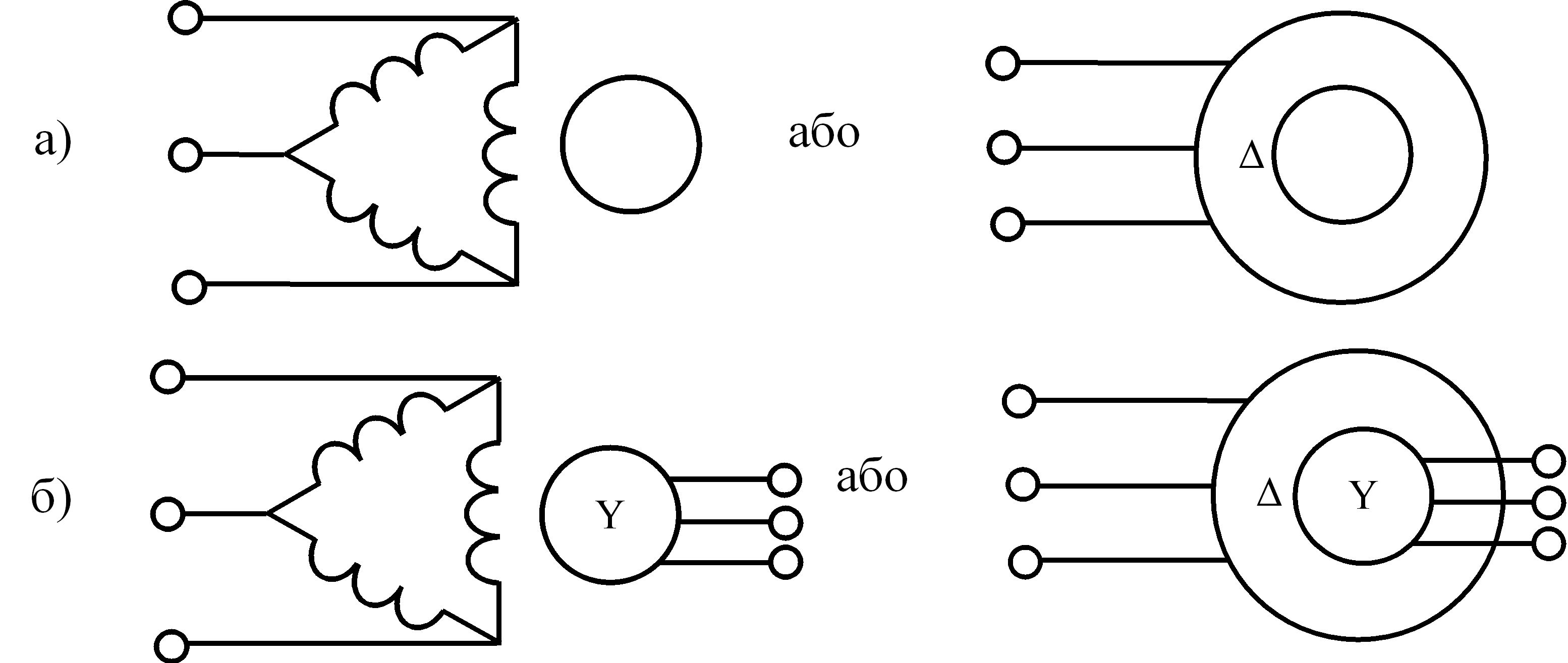
Рис. 5.35 – Умовні позначення на електричних схемах трифазних асинхронних двигунів: а – з короткозамкненим ротором, б – з фазним ротором
Способи пуску трифазного асинхронного електродвигуна. Як вже вказувалося, трифазний асинхронний двигун має незадовільні пускові характеристики. Сила пускового струму трифазного асинхронного двигуна перевищує номінальну силу струму в 6÷8 разів. Також у момент пуску обертальний момент двигуна є малим, тому запуск двигуна необхідно здійснювати без навантаження.
Найпростішим є пуск двигуна, що здійснюється безпосереднім вмиканням у мережу. Цей спосіб застосовується для вмикання двигунів малої потужності. Він є найбільш простим, але має основний недолік – великий пусковий струм. Це небезпечно як для самого двигуна, так і для мережі, що його живить.
Для зменшення величин пускових струмів у трифазних асинхронних двигунах з короткозамкненим ротором застосовуються ротори спеціальної конструкції. Найбільш часто застосовуються ротор із глибоким пазом (або з витисненням струму) та ротор із подвійною "білячою кліткою".
У роторі з глибоким пазом провідники обмотки розташовані ближче до осі обертання ротора, тому обмотка має збільшену індуктивність. У момент пуску частота струму в обмотці ротора дорівнює синхронній частоті, індуктивній опір глибинної частини обмотки ротора збільшений і відбувається витиснення струму у верхню частину обмотки. Таким чином, при пуску збільшується активний опір обмотки ротора та поліпшуються пускові характеристики двигуна.
Ротор із подвійною "білячою кліткою" має дві обмотки: верхню та нижню. Верхня обмотка ротора виготовляється таким чином, що має більший активний опір (виготовляється не з міді, а з алюмінію, має зменшений переріз провідників), ніж нижня обмотка. У момент пуску працює верхня обмотка, а в сталому режимі – нижня.
Другим способом пуску, який застосовується достатньо часто, є пуск за зниженої напруги. Зниження напруги досягається наступним шляхом:
– за допомогою переключення обмоток із "зірки" на "трикутник";
– за допомогою автотрансформатора,
– за допомогою вмикання послідовно з обмоткою пускового реостата (активного опору);
– за допомогою вмикання послідовно з обмоткою реактивної котушки (реактивного опору).
Але за зниженої напруги зменшується пусковий момент двигуна. Тому запуск двигуна цим способом необхідно здійснювати без навантаження.
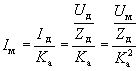
На рис. 5.36 показано пуск трифазного асинхронного двигуна з короткозамкненим ротором за допомогою переключення обмоток із "зірки" на "трикутник".
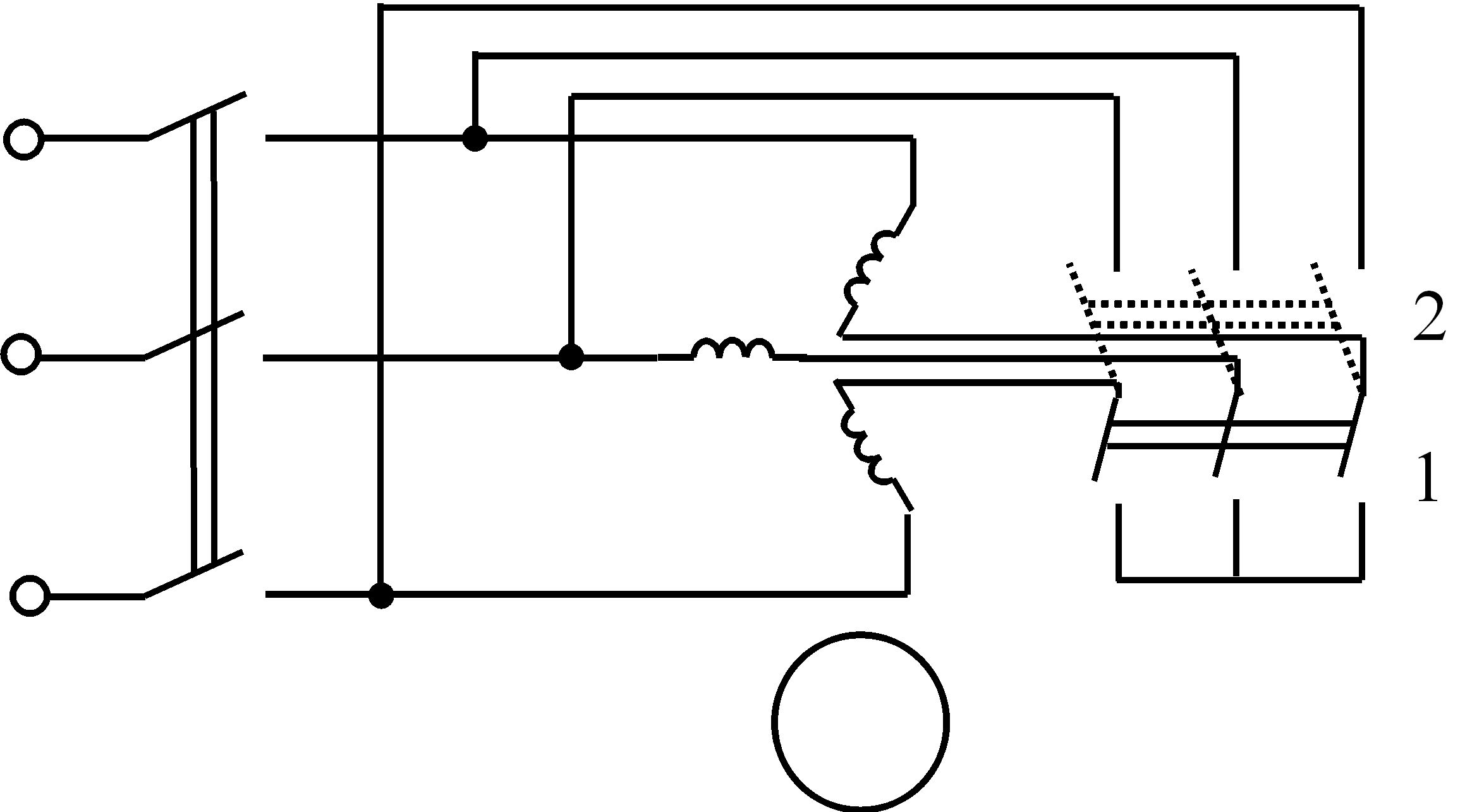
Рис. 5.36 – Пуск трифазного асинхронного двигуна з короткозамкненим ротором за допомогою переключення обмоток із "зірки" на "трикутник"
При такому способі пуску перед вмиканням живлення статор включають за схемою "зірка" (положення 1), а коли двигун набере номінальних обертів, обмотки статора переключають на схему "трикутник" (положення 2).
Таким чином, при пуску двигуна напруга на статорі в ![]() разів менше номінальної (лінійної) напруги. Застосовуючи відомі співвідношення для лінійних та фазних напруг і сил струмів трифазної мережі, отримуємо відношення пускових сил струмів:
разів менше номінальної (лінійної) напруги. Застосовуючи відомі співвідношення для лінійних та фазних напруг і сил струмів трифазної мережі, отримуємо відношення пускових сил струмів:
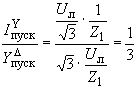 , (5.89)
, (5.89)
де ![]() – пускова сила струму при з’єднанні обмоток "зіркою", [А],
– пускова сила струму при з’єднанні обмоток "зіркою", [А], ![]() – пускова сила струму при з’єднанні обмоток "трикутником", [А]; Uл – лінійна напруга мережі живлення, [В]; Z1 – опір фази двигуна, [Ом].
– пускова сила струму при з’єднанні обмоток "трикутником", [А]; Uл – лінійна напруга мережі живлення, [В]; Z1 – опір фази двигуна, [Ом].
З формули (5.89) видно, що пуск двигуна з короткозамкненим ротором способом переключення обмоток із "зірки" на "трикутник" зменшує пусковий струм у три рази.
На рис. 5.37 показано пуск трифазного асинхронного двигуна з короткозамкненим ротором за допомогою автотрансформатора.
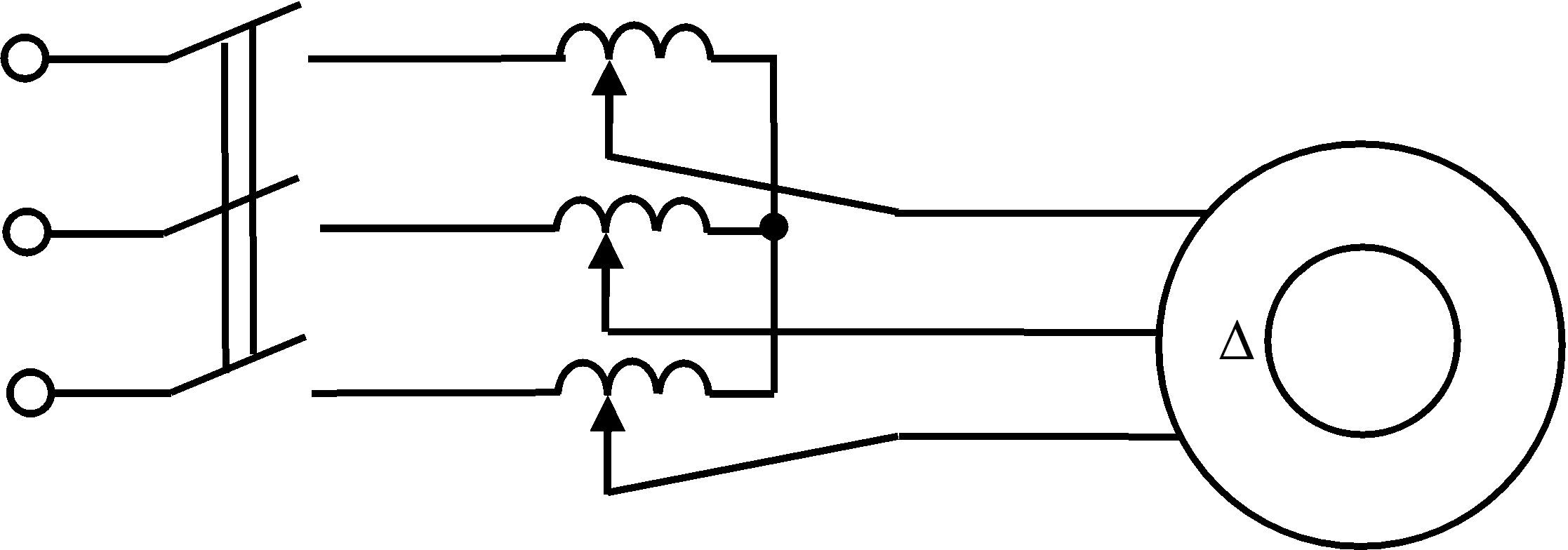
Рис. 5.37 – Пуск трифазного асинхронного двигуна з короткозамкненим
ротором за допомогою автотрансформатора
При такому способі пуску перед вмиканням живлення за допомогою автотрансформатора напруга, що подається на обмотку статора двигуна, знижується до значення  , де Uм – номінальна напруга у мережі живлення, Ка – коефіцієнт трансформації автотрансформатора. Тоді пускову силу струму у мережі можна визначити за формулою:
, де Uм – номінальна напруга у мережі живлення, Ка – коефіцієнт трансформації автотрансформатора. Тоді пускову силу струму у мережі можна визначити за формулою:
 , (5.90)
, (5.90)
де Ід – пускова сила струму двигуна; Zд– повний опір обмотки двигуна.
З формули (5.90) видно, що пуск двигуна з короткозамкненим ротором за допомогою автотрансформатора зменшує пусковий струм у ![]() разів.
разів.
Пуск трифазного асинхронного електродвигуна з фазним ротором, як правило, здійснюється за допомогою вмикання послідовно з обмоткою ротора пускового реостата. Схему пуску подано на рис. 5.38.
Пусковий реостат включається в коло обмоток ротора послідовно. Вмикання реостата проводиться за допомогою щіток і кілець, до яких кріпляться початки обмоток ротора, а кінці з’єднуються між собою. Реостат у момент пуску створює максимальний опір у колі обмотки ротора. У міру розгону двигуна опір пускового реостата зменшується до нуля. В кінці пуску обмотки з’єднуються накоротко.
Пуск за допомогою вмикання послідовно з обмоткою реактивної котушки (реактора) виконується аналогічно. Реактор є додатковим індуктивним опором, що зумовлює зниження напруги на затискачах обмотки (на 30-40 %). Негативними якостями цього способу пуску залишається зменшення пускового моменту і зростання вартості установки, внаслідок застосування реакторів.
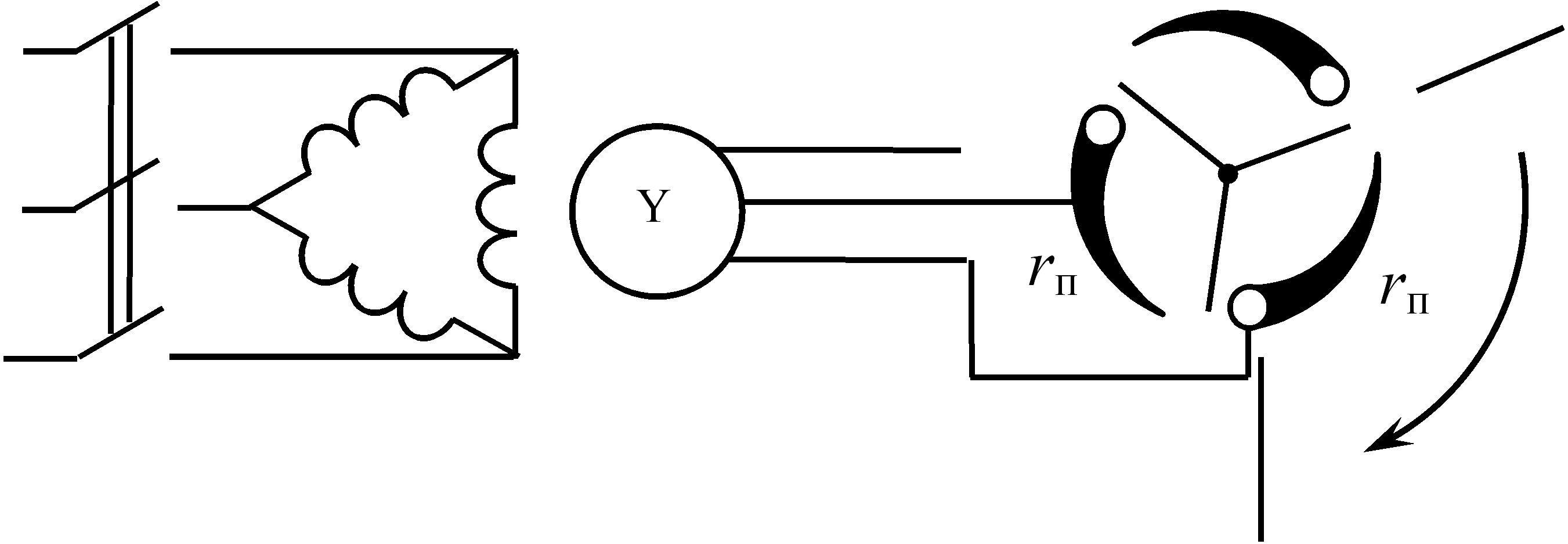
Рис. 5.38 – Пуск трифазного асинхронного електродвигуна з фазним ротором за допомогою вмикання послідовно з обмоткою ротора пускового реостата
Регулювання швидкості обертання вала ротора. Трифазні асинхронні двигуни, як правило, застосовуються у приводах, де регулювання швидкості обертання вала двигуна не передбачене.
Аналіз співвідношення (5.61) дозволяє зробити висновок, що швидкість обертання вала ротора трифазного асинхронного двигуна можна регулювати шляхом або зміною кількості пар полюсів p, або зміною частоти f1 струму живлення.
Регулювання швидкості обертання вала ротора трифазного асинхронного двигуна зміною кількості пар полюсів p є ступеневим.
Регулювання швидкості обертання валу ротору трифазного асинхронного двигуна зміною частоти f1 струму живлення вимагає наявності спеціального достатньо дорогого приладу, який дозволяє плавно змінювати частоту.
Регулювання швидкості обертання вала ротора трифазного асинхронного двигуна з фазним ротором здійснюється шляхом зміни величини додаткового активного опору реостата, що включений у фазні обмотки ротора аналогічно вмиканню пускового реостата (рис. 5.38).
Реверсування трифазного асинхронного двигуна здійснюється шляхом зміни напрямку обертання магнітного поля статора. Для цього необхідно поміняти місцями будь-які два лінійні проводи. Перед реверсуванням двигун необхідно повністю зупинити для запобігання виникненню пожежонебезпечного режиму роботи.
Однофазний асинхронний двигун. У системах однофазного струму застосовують однофазні асинхронні двигуни. Внаслідок того, що у статорі є лише одна обмотка, в ньому буде створюватися магнітний потік, що є пульсуючим але нерухомим у просторі. В зазорі між статором і ротором магнітний потік спрямований вздовж осі обмотки статора (рис. 5.39,а). Тому ротор знаходиться під дією двох магнітних потоків, що обертаються у протилежних напрямках. Магнітний момент дорівнює нулю, і ротор не обертається.
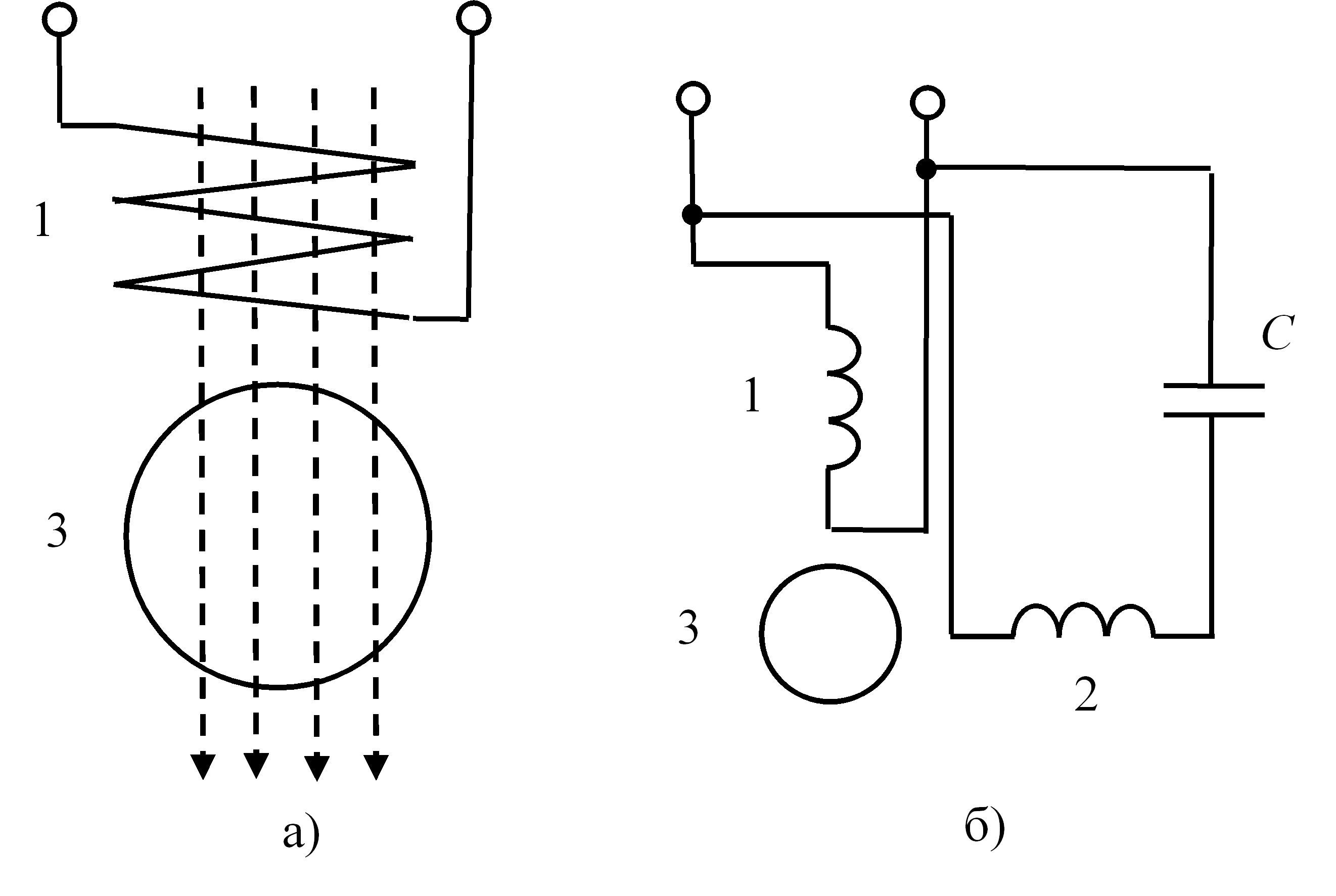
Рис. 5.39 – Однофазний асинхронний двигун: а – принцип дії, б – схема пуску
1 – робоча обмотка; 2 – пускова обмотка; 3 – ротор; С – конденсатор
Для пуску однофазного асинхронного двигуна необхідно надати ротору початкового напрямку обертання, наприклад поштовхом руки.
На практиці для пуску однофазного асинхронного двигуна у статорі улаштовують додаткову пускову обмотку, вісь якої є перпендикулярною осі основної (робочої) обмотки. Для отримання обертового магнітного поля пускова обмотка вмикається через конденсатор, чим досягається зсув струмів близько ![]() (рис. 5.39,б).
(рис. 5.39,б).
Для реверсування двигуна необхідно поміняти місцями затискачі робочої або пускової обмоток.
Однофазні асинхронні двигуни найбільш часто застосовуються в електричних приладах побутового призначення.
Колекторний двигун змінного струму. Крім асинхронних безколекторних двигунів, на практиці застосовуються асинхронні колекторні двигуни змінного струму, наприклад, для привода побутових електричних приладів (пилососів, вентиляторів, швейних машин тощо).
Якщо в обмотці у двигуні постійного струму одночасно змінити напрямки струмів збудження основного магнітного поля нерухомої частини та магнітного поля якоря, то напрямок обертального моменту не зміниться. Одночасна зміна напрямків струмів збудження основного магнітного поля нерухомої частини та магнітного поля якоря легко відтворюється у двигуні постійного струму з послідовним збудженням. Таким чином машина постійного струму з послідовним збудженням може працювати на змінному струмі, тобто бути електричним колекторним двигуном змінного струму.
Конструктивно колекторні двигуни змінного струму є аналогічними двигунам постійного струму з послідовним збудженням. Враховуючи, що у статорі двигуна змінного струму виникає змінний магнітний потік, статор виготовляють з тонких пластин електротехнічної сталі, тоді як осердя нерухомої частини машини постійного струму виготовляють із прокатної сталі.
Колекторні двигуни змінного струму розвивають високий пусковий та обертальний моменти, мають високу швидкість обертів вала (до 20000 об/хв).
Недоліками колекторних двигунів змінного струму є складність виготовлення, наявність колектора, низька надійність у роботі.
Маркування асинхронних двигунів. До кожного двигуна додається паспорт; крім того, на корпусі двигуна закріплюється паспортна табличка. В паспортній табличці вказують наступні відомості: тип електродвигуна, заводський номер, номінальну напругу мережі живлення, номінальний струм, що споживається двигуном, номінальну потужність двигуна, швидкість обертання вала ротора за номінального навантаження, коефіцієнт потужності за номінального навантаження, коефіцієнт корисної дії за номінального навантаження, частоту струму мережі живлення, рік випуску, вагу. Також вказуються ступінь захисту оболонки, кліматичне виконання та категорія розміщення.
У маркуванні типу електродвигуна знаходиться інформація про серію, вид двигуна та габарит.
Приклад маркування асинхронного двигуна: 4АНА90LB8У3. Розшифровується наступним чином: 4 – номер серії, А – вид двигуна (асинхронний), Н – ступінь захисту оболонки ІР23, А – алюмінієва станина та щити, 90 – висота осі обертання, мм, L – довжина корпуса, В – довжина осердя, 8 – число полюсів, У – кліматичне виконання, 3 – категорія розміщення.
На рис. 5.40 приведено зовнішній вигляд трифазних асинхронних двигунів.


Рис. 5.40 – Зовнішній вигляд трифазного асинхронного електродвигуна:
а – серія 4А (загального призначення), б – марка ВА-250М4 (вибухозахищений)
Пожежна небезпека асинхронних двигунів. Асинхронні електродвигуни з короткозамкненим ротором при нормальних режимах роботи не являють собою підвищеної пожежної небезпеки. Двигуни не мають частин, що іскрять, і за умов своєчасного технічного обслуговування та роботи у номінальному режимі безвідмовно працюють протягом десятиліть.
Асинхронні електродвигуни з фазним ротором мають контактні кільця та щітковий вузол. Тому пожежна небезпека цього типу двигунів є подібною до пожежної небезпеки двигунів постійного струму.
Найбільш характерним пожежонебезпечним режимом роботи електричних двигунів є механічне перевантаження вала. Внаслідок цього двигун споживає підвищений струм, що призводить до інтенсивного розігріву обмоток (струмове перевантаження) і старіння ізоляції. Також імовірні короткі замикання (міжвиткові або на корпус), внаслідок яких виникають іскри та дуги. Великі перехідні опори ймовірні у місцях вводу кабелю живлення.
Особливу небезпеку для трифазних двигунів становить так званий неповнофазний режим роботи, коли перегоряє плавкий запобіжник в одному з провідників живлення двигуна та двигун працює на двох фазах. При цьому з мережі споживається підвищений струм, двигун перегрівається та може вийти з ладу, або стати причиною пожежі.
Електричний двигун підлягає періодичному технічному обслуговуванню, яке передбачає необхідність змащування підшипникових вузлів, замір опору ізоляції обмоток, підтягування болтових з’єднань. Для електричного двигуна з фазним ротором додатково обслуговується щітковий вузол: визначається ступінь зносу щіток та необхідність їх заміни у випадку зношування, визначається ступінь зносу контактних кілець і необхідність їх шліфування.
Для усіх видів електричних машин змінного струму пожежна небезпека значно підвищується при погіршенні умов їх охолодження.