5.3.2. Синхронні машини
Синхронна машина має властивість зворотності, тобто може працювати як у режимі генератора, так і у режимі двигуна, а це значить, що конструкції синхронного генератора і синхронного двигуна є однаковими.
Конструкція синхронної машини. Синхронна машина є машиною змінного струму. Тому вона має дві основні частини: ротор (частина, що обертається) і статор (нерухома частина).
Конструкція статора синхронної машини принципово не відрізняється від конструкції статора асинхронного двигуна.
Конструкція ротора синхронної машини суттєво відрізняється від конструкції ротора асинхронного двигуна. Ротор синхронної машини являє собою електромагніт, який живиться постійним струмом. Для цього два кінці обмотки ротора виводяться на контактні кільця, розташовані на валу ротора. Постійний струм до контактних кілець ротора підводиться за допомогою щіток. Існує дві конструкції ротора синхронної машини: явнополюсний ротор та неявнополюсний ротор. На рис. 5.41,а подано конструкцію явнополюсного (чотириполюсного) ротора, на рис. 5.41,б – неявнополюсного (двополюсного) ротора.
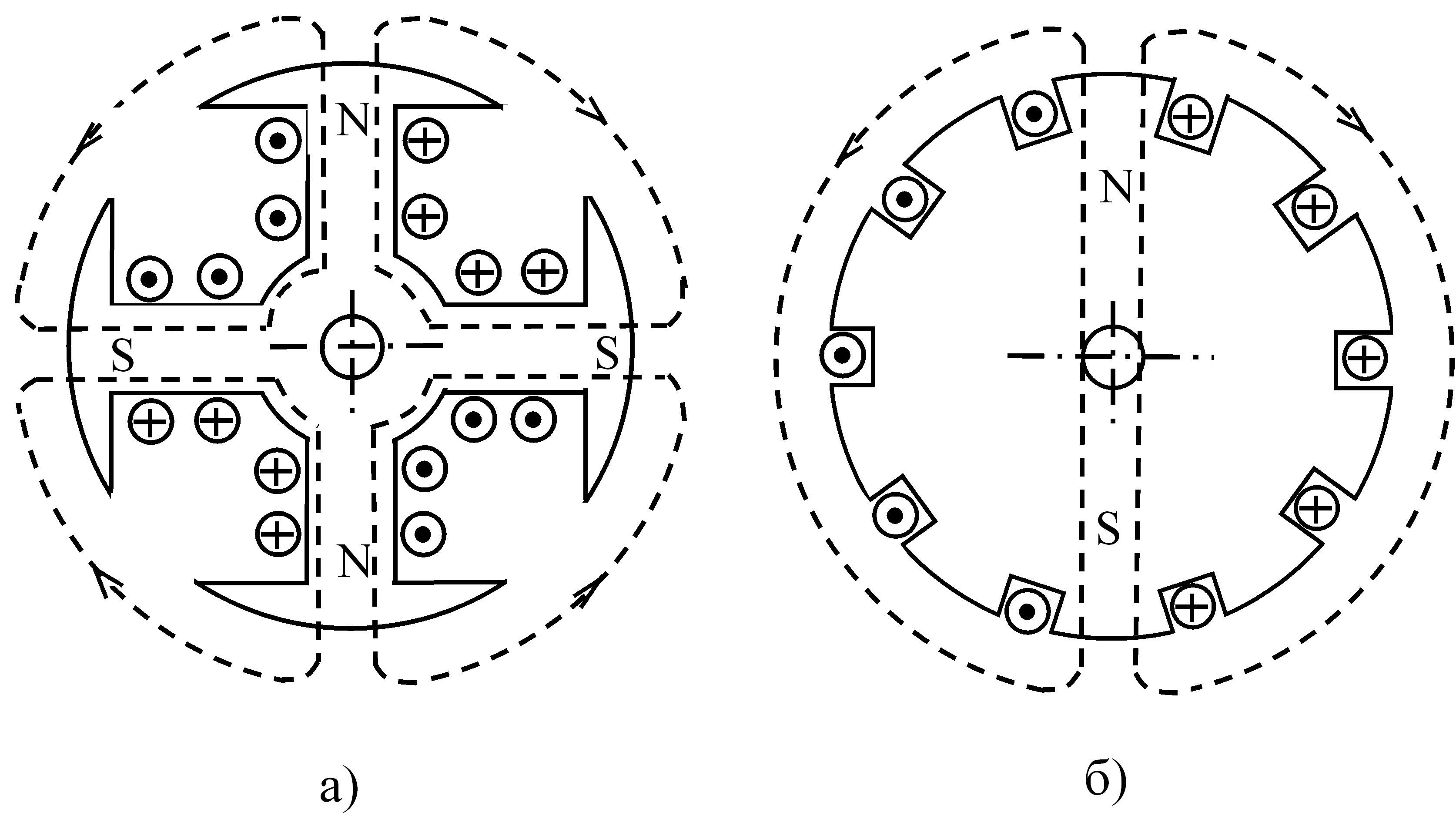
Рис. 5.41 – Поперечний переріз роторів синхронних машин: а – явнополюсного, б – неявнополюсного
Явнополюсний ротор застосовується у тихохідних синхронних машинах (зі швидкістю обертання вала до 1000÷1500 об/хв). У швидкохідних синхронних машинах застосування явнополюсного ротора ускладнене внаслідок наявності великих відцентрових сил. У таких машинах застосовують неявнополюсний ротор, який конструктивно не має полюсів, що виступають.
Обмотка ротора збуджує постійний магнітний потік, тому називається обмоткою збудження.
Постійний струм для збудження обмоток ротора подається або від окремого генератора постійного струму, вал якого обертається разом із валом ротора синхронної машини (такий генератор називається збудником), або від окремого випрямляча.
Однофазні синхронні машини не знайшли широкого застосування, тоді як трифазні синхронні машини застосовуються достатньо широко. Так, на електричних станціях для виробляння електричної енергії застосовуються виключно синхронні генератори, які виробляють трифазний струм частотою 50 Гц.
Обертальний момент синхронної машини. Визначимо на прикладі синхронного генератора. Електрична потужність, що віддається трифазним синхронним генератором при симетричному навантаженні розраховується за формулою:
![]() , [Вт], (5.91)
, [Вт], (5.91)
де m1 – кількість фаз обмотки статора (для трифазного генератора m1 = 3); U1 – напруга на затискачах статора, [B]; I1 – сила струму в обмотках статора, [А]; φ1 – кут зсуву фаз між напругою та струмом статора (раніше домовилися, що величини, які відносяться до статора, позначатимуться індексом 1, до ротора – індексом 2 відповідно).
На основі формули (5.78) запишемо вираз для механічної потужності Рмех, що передається генератору первинним двигуном:
![]() , [Вт], (5.92)
, [Вт], (5.92)
де М – обертальний момент, [Н∙м]; ω2 – кутова швидкість обертання ротора, [рад/c].
Нехтуючи втратами, можна записати:
![]() . (5.93)
. (5.93)
З урахуванням формул (5.91) та (5.92) з формули (5.93) отримуємо вираз для моменту, що долається первинним двигуном:
 , [Н∙м]. (5.94)
, [Н∙м]. (5.94)
У випадку, що аналізується (синхронна машина працює генератором), момент протидіє обертанню ротора. Враховуючи, що синхронна машина має властивість зворотності, у випадку, коли машина працює двигуном, момент М стає обертальним.
Магнітне поле статора обертається синхронно з ротором. Але між ЕРС статора Е1 та напругою U1 на затискачах статора є кут, який називається кутом неузгодженості та позначається θ. Урахування кута θ у формулі (5.94) приводить до наступного співвідношення для моменту:
![]() , [Н∙м], (5.95)
, [Н∙м], (5.95)
де позначено  – амплітудне значення моменту, [Н∙м]; ІКЗ – сила струму короткого замикання, який виникає в генераторі при замикання накоротко обмоток статора, [А].
– амплітудне значення моменту, [Н∙м]; ІКЗ – сила струму короткого замикання, який виникає в генераторі при замикання накоротко обмоток статора, [А].
На рис. 5.42 приведено кутову характеристику синхронної машини (залежність М = f (θ)).
З кутової характеристики випливає, що при 0 <θ< π маємо M > 0, що відповідає режиму двигуна. При – π < θ < 0 маємо M < 0, що відповідає режиму генератора.
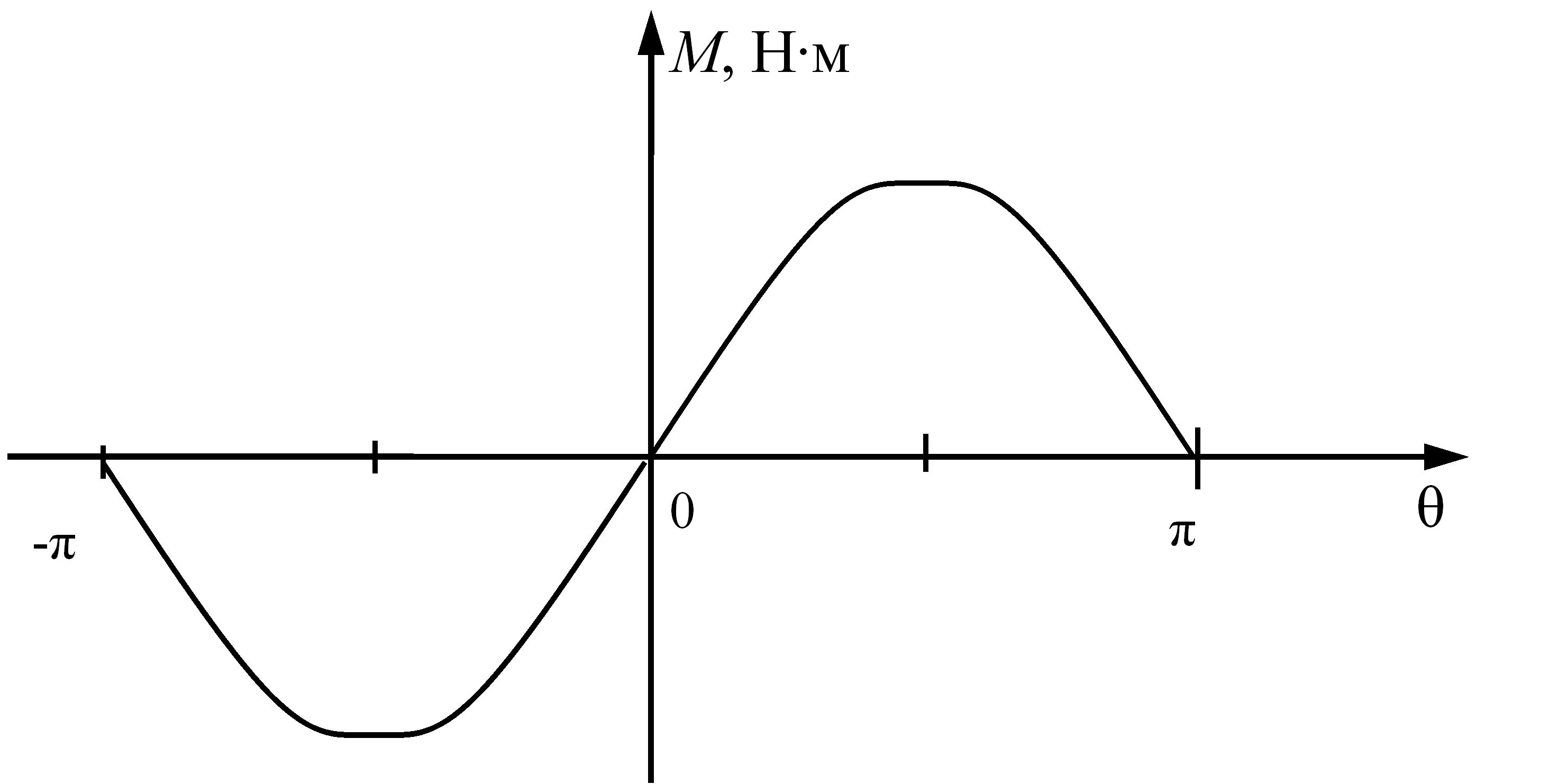
Рис. 5.42 – Кутова характеристика синхронної машини
Реакція якоря синхронної машини. Інколи статор синхронної машини називають якорем синхронної машини (за раніше введеним визначенням, якір – частина електричної машини, що індукує ЕРС), а ротор – індуктором синхронної машини.
Реакція якоря синхронної машини – це взаємодія магнітних полів статора (якоря) та ротора (індуктора) синхронної машини.
Розглянемо реакцію якоря на прикладі синхронної машини, яка працює генератором. Якщо синхронний генератор працює під навантаженням, то в обмотках статора (якоря) існує змінний струм, який створює власне магнітне поле, яке взаємодіє з магнітним полем ротора (індуктора).
Тільки за активного навантаження генератора ЕРС та сила струму статора (якоря) збігаються за фазою. Тому магнітний потік статора (якоря) відстає від магнітного потоку ротора (індуктора) на кут ![]() .
.
Тільки за індуктивного навантаження генератора ЕРС статора (якоря) випереджає силу струму статора (якоря) на кут ![]() . Тому магнітний потік статора (якоря) "відстає" від магнітного потоку ротора (індуктора) на кут π (знаходиться у проти-фазі) та ослабляє магнітний потік ротора (індуктора).
. Тому магнітний потік статора (якоря) "відстає" від магнітного потоку ротора (індуктора) на кут π (знаходиться у проти-фазі) та ослабляє магнітний потік ротора (індуктора).
Тільки за ємнісного навантаження генератора ЕРС статора (якоря) відстає від сили струму статора (якоря) на кут ![]() . Тому магнітний потік статора (якоря) співпадає за фазою з магнітним потоком ротора (індуктора) та посилює магнітний потік ротора (індуктора).
. Тому магнітний потік статора (якоря) співпадає за фазою з магнітним потоком ротора (індуктора) та посилює магнітний потік ротора (індуктора).
За змішаного характеру навантаження синхронного генератора реакція якоря (статора) буде проміжною.
ККД синхронної машини. Причини втрат у синхронній машині наступні: втрати на збудження, електричні втрати в обмотці статора, магнітні втрати у статорі, електричні втрати в обмотці ротора, магнітні втрати в роторі, механічні втрати в підшипниках, втрати за рахунок пульсації магнітного потоку при переході через пази статора. Позначимо сумарну потужність усіх втрат Pвтрат. Тоді коефіцієнт корисної дії можна визначити з урахуванням формули (1.9).
ККД генератора:
 (5.96)
(5.96)
ККД двигуна:
 (5.97)
(5.97)
де U1 – напруга на затискачах статора, [B]; I1 – сила струму в обмотках статора, [А]; φ1 – кут зсуву фаз між напругою та струмом статора.
ККД залежить від навантаження. Реально ККД синхронної машини сягає значення 88÷99 %.
Синхронний генератор. У генераторному режимі обмотка ротора синхронної машини збуджується постійним струмом. Вал ротора за допомогою стороннього привода обертається з постійною швидкістю. Магнітний потік ротора обертається разом із ротором та індукує змінну ЕРС в обмотці статора.
Відповідно до формули (5.66) ЕРС однієї фази обмотки статора визначається за формулою:
![]() , [В], (5.98)
, [В], (5.98)
де w1 – число послідовно з’єднаних витків обмотки статора; f1 – частота струму в обмотці статора, [Гц]; Фm – магнітний потік статора, [Вб]; k1 – обмотувальний коефіцієнт статора.
Відповідно до формули (5.64) частота ЕРС в обмотці статора визначається за формулою:
![]() , [Гц], (5.99)
, [Гц], (5.99)
де n1 – синхронна швидкість, [![]() ].
].
Властивості синхронного генератора описуються його характеристиками, що знімаються за постійної швидкості обертання вала ротора n2 = const:
- Характеристика холостого ходу – залежність ЕРС статора Е1 від сили струму збудження І2: Е1 = f (І2). Зразковий вид характеристики холостого ходу приведено на рис. 5.43.
- Зовнішня характеристика – залежність напруги U1 від сили струму навантаження Ін за постійної сили струму збудження I2 = const: U1 = f (Ін). Зразковий вид зовнішньої характеристики для різних видів реактивності навантаження приведено на рис. 5.44,а.
- Регулювальна характеристика – залежність сили струму збудження І2 від сили струму статора (якоря) І1 за постійної напруги на навантаженні U1 = const: І2 = f (Ін). Зразковий вид регулювальної характеристики для різних видів реактивності навантаження подано на рис. 5.44,б. При активно-індуктивному навантаженні силу струму збудження слід збільшувати, а при ємнісному – зменшувати.
- U-подібна характеристика – залежність сили струму статора (якоря) І1 від сили струму збудження І2: І1 = f (І2). Зразковий вид U-подібної характеристики для різних потужностей навантаження (P1 = 0, P2 < P3) подано на рис. 5.45. Сила струму статора (якоря) І1 є мінімальною при cosφ = 1 (кут φ описує ступінь реактивності навантаження генератора). Частини U-подібних кривих зліва від пунктирної лінії описують струми, сили яких відстають від напруги мережі та випереджають напругу генератора (тобто намагнічують генератор). Частини U-подібних кривих справа від пунктирної лінії описують струми, сили яких випереджають напругу мережі та відстають від напруги генератора (тобто розмагнічують генератор).
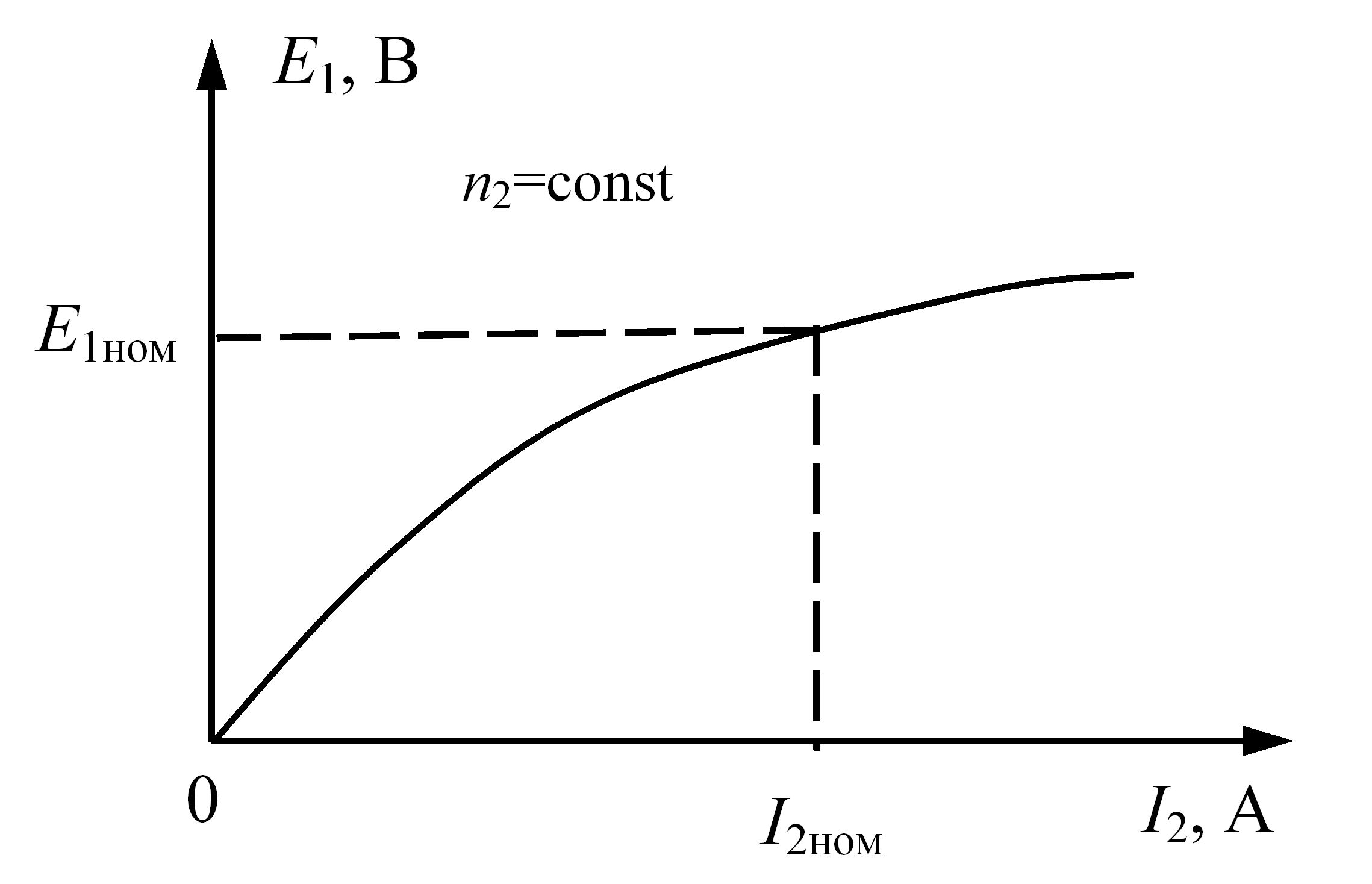
Рис. 5.43 – Зразковий вид характеристики холостого ходу синхронного
генератора
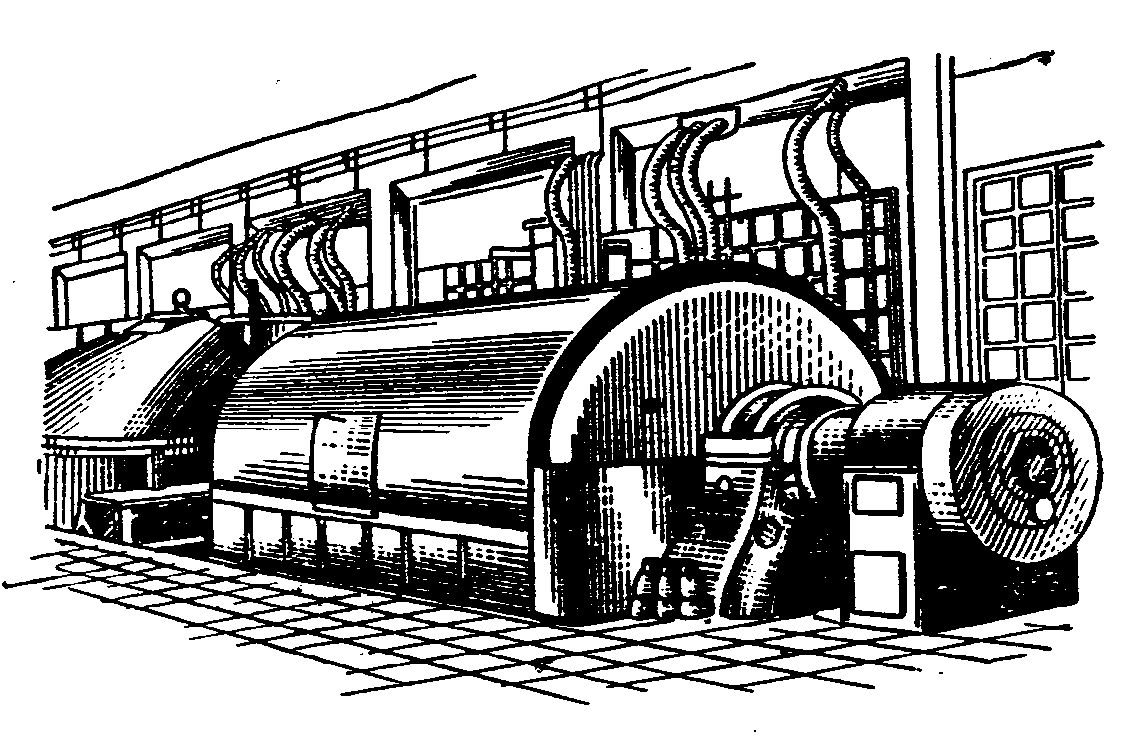
Зовнішній вигляд синхронного явнополюсного генератора зі збудником приведено на рис. 5.46.
Зовнішній вигляд синхронного неявнополюсного генератора зі збудником приведено на рис. 5.47.
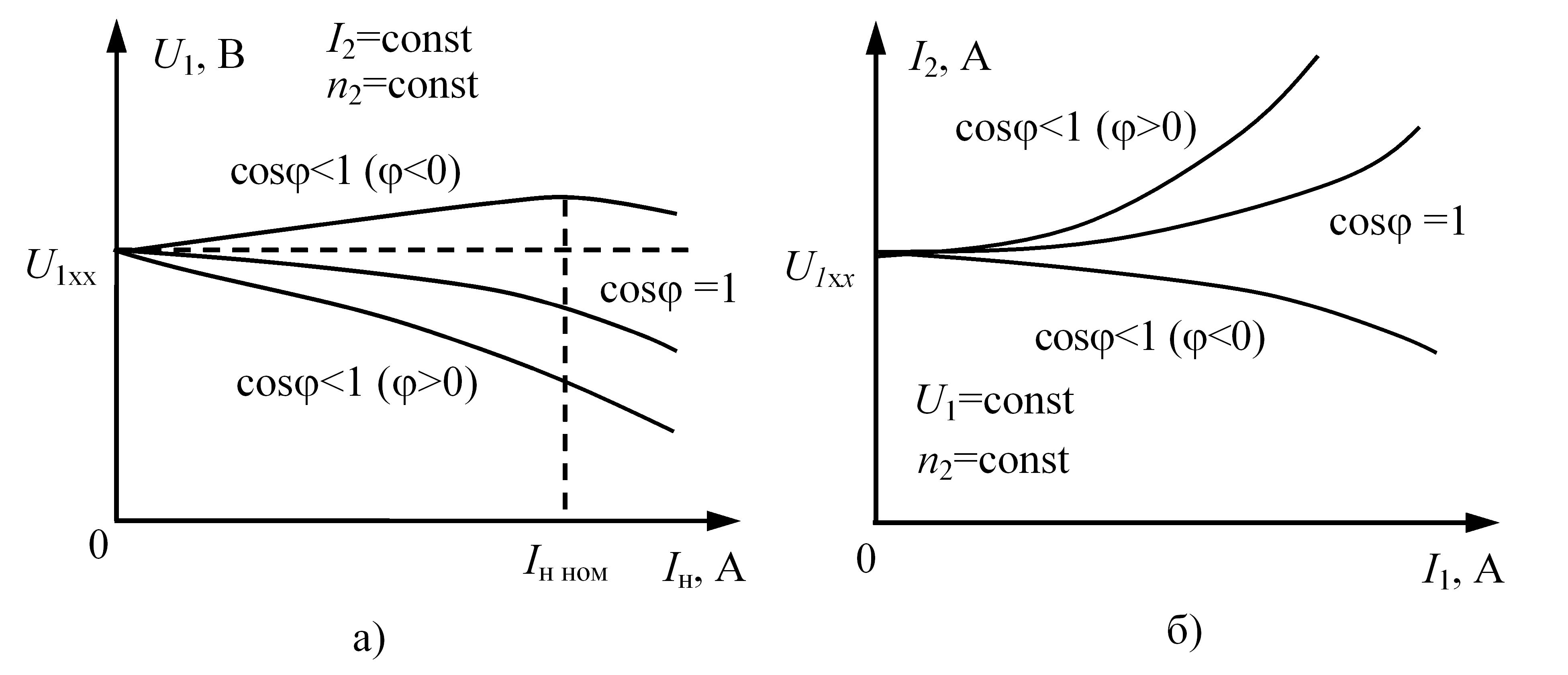
Рис. 5.44 – Зразковий вид характеристик синхронного генератора:
а – зовнішня, б – регулювальна
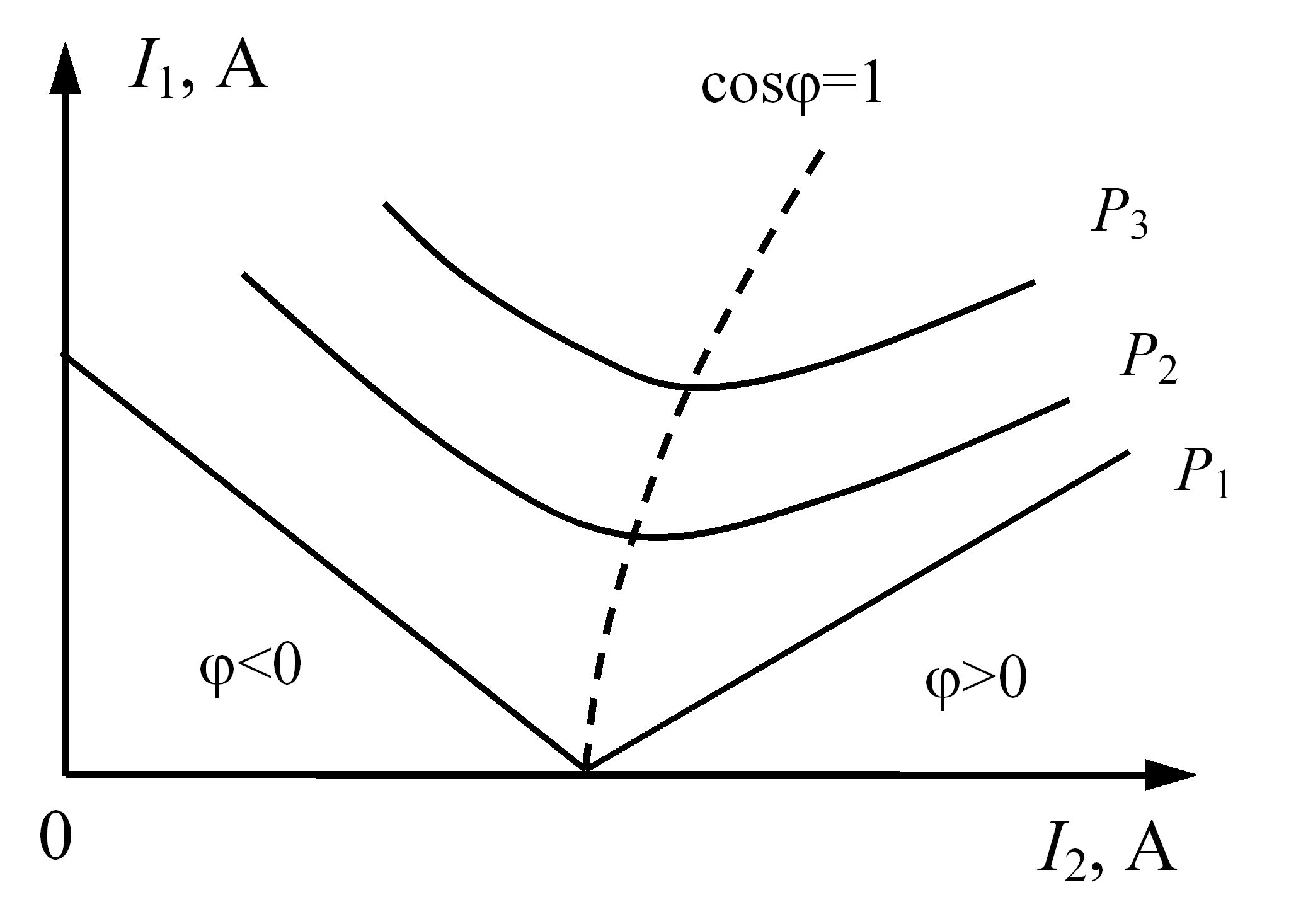
Рис. 5.45 – Зразковий вид U-подібної характеристики синхронного генератора
Охолодження синхронних генераторів буває вакуумне, рідинне і водневе. Водневе охолодження застосовується для генераторів великої потужності (більше 25 МВт). Водень легший за повітря в 14,3 раза, його теплоємність у 14 разів більше, теплопровідність у 7 разів більше і коефіцієнт тепловіддачі з поверхні в 1,35 раза більше. Перший генератор із водневим охолодженням був побудований у 1943 році.
|
Рис. 5.46 – Синхронний явнополюсний генератор зі збудником |
Рис. 5.47 – Синхронний неявнополюсний генератор зі збудником |
Особливості вмикання синхронного генератора в енергосистему. На електричних станціях для виробляння електричної енергії застосовуються виключно трифазні синхронні генератори. Таким чином, усі генератори енергосистеми країни працюють паралельно. Для запобігання аваріям та пожежам при вмиканні окремого генератора в енергосистему необхідно дотримуватися ряду умов:
- частота ЕРС окремого генератора повинна дорівнювати частоті струму в енергосистемі (регулюється швидкістю обертання вала ротора);
- ЕРС окремого генератора повинна дорівнювати напрузі в енергосистемі (регулюється струмом збудження);
- ЕРС окремого генератора та напруга в енергосистемі повинні збігатися за фазою (регулюється зміною швидкості обертання ротора в межах одного оберту);
- послідовність фаз генератора повинна збігатися з послідовністю фаз в енергосистемі.
Для вмикання синхронного генератора в енергосистему застосовують два способи: точну синхронізацію та самосинхронізацію. При точній синхронізації параметри окремого генератора перед вмиканням повинні точно відповідати параметрам енергосистеми. Самосинхронізація полягає у тому, що окремий генератор вмикається в енергосистему без збудження при накоротко замкненій обмотці ротора, але швидкість обертання вала ротора є близькою до синхронної. Після вмикання в обмотку ротора подають постійний струм збудження та генератор синхронізується під дією електромагнітних сил. Недоліком цього методу є кидок струму в кожній обмотці статора в момент вмикання.
Синхронний двигун. У режимі двигуна обмотка ротора синхронної машини збуджується постійним струмом. Обмотка статора підключена до джерела трифазного струму, тому навколо неї створюється магнітне поле, що обертається (рис. 5.48).
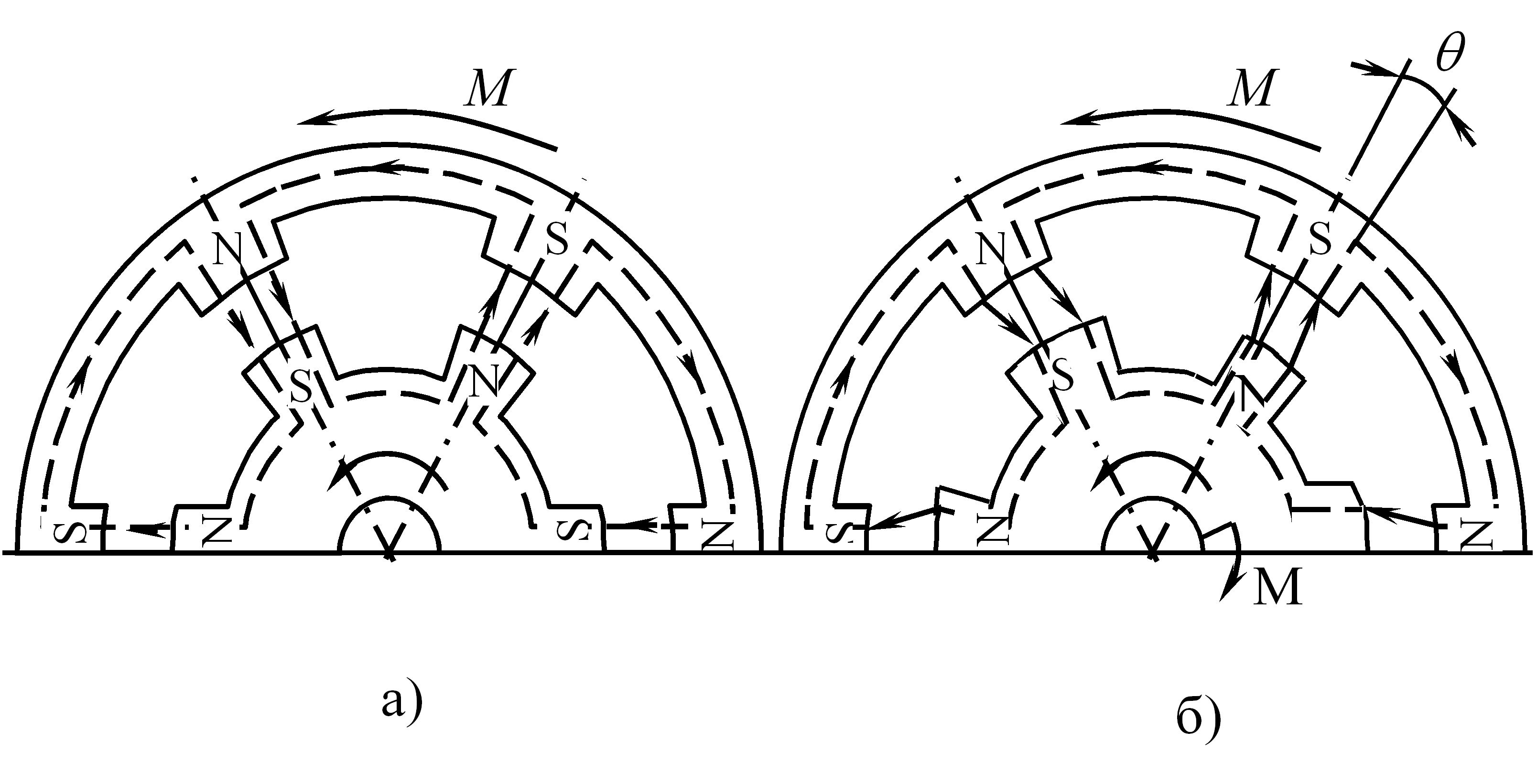
Рис. 5.48 – Принцип дії трифазного синхронного двигуна
Якщо збуджений ротор є нерухомим, то на кожний з полюсів ротора (вони мають велику інерційність) буде діяти обертове поле статора, сила якого спрямована то в одну, то в іншу сторону (залежно від напівперіоду). У зв’язку з цим результуючий за період обертаючий момент буде дорівнювати нулю. Тому ротор синхронного двигуна не може почати обертатися самостійно, що є істотним недоліком синхронного двигуна.
Якщо збуджений ротор синхронного двигуна розкрутити до швидкості, рівної номінальній, а потім підключити статор у мережу трифазного струму (за відповідного розташування полюсів), то різнойменні полюси ротора і статора будуть притягатися один до одного, у результаті чого ротор почне обертатися із синхронною швидкістю.
За збільшення навантаження на валу ротор дещо загальмується, проте швидкість обертання його залишиться незмінною – синхронною.
Синхронні двигуни застосовуються в механізмах, де необхідна постійна швидкість обертання (наприклад, для привода потужних насосів і повітродувок).
Основною характеристикою синхронного двигуна є U-подібна характеристика – залежність сили струму статора (якоря) І1 від сили струму збудження І2: І1 = f (І2). Зразковий вид U-подібної характеристики для різних гальмуючих моментів на валу ( M1 = 0, M2 < M3) подано на рис. 5.49.
З U-подібної характеристики синхронного двигуна видно, що за деякої сили струму збудження (номінальне збудження) сила струму у статорі двигуна є найменшою, що відповідає коефіцієнту потужності двигуна cosφ, рівному одиниці. За зменшення сили струму збудження проти номінального (недозбудження) сила струму у статорі збільшується, тобто коефіцієнт потужності зменшується (індуктивне навантаження). За збільшення сили струму збудження проти номінального (перезбудження) сила струму статора збільшується, а коефіцієнт потужності стає негативним (ємнісне навантаження). Ця властивість синхронних двигунів використовується для підвищення коефіцієнта потужності електричної мережі.
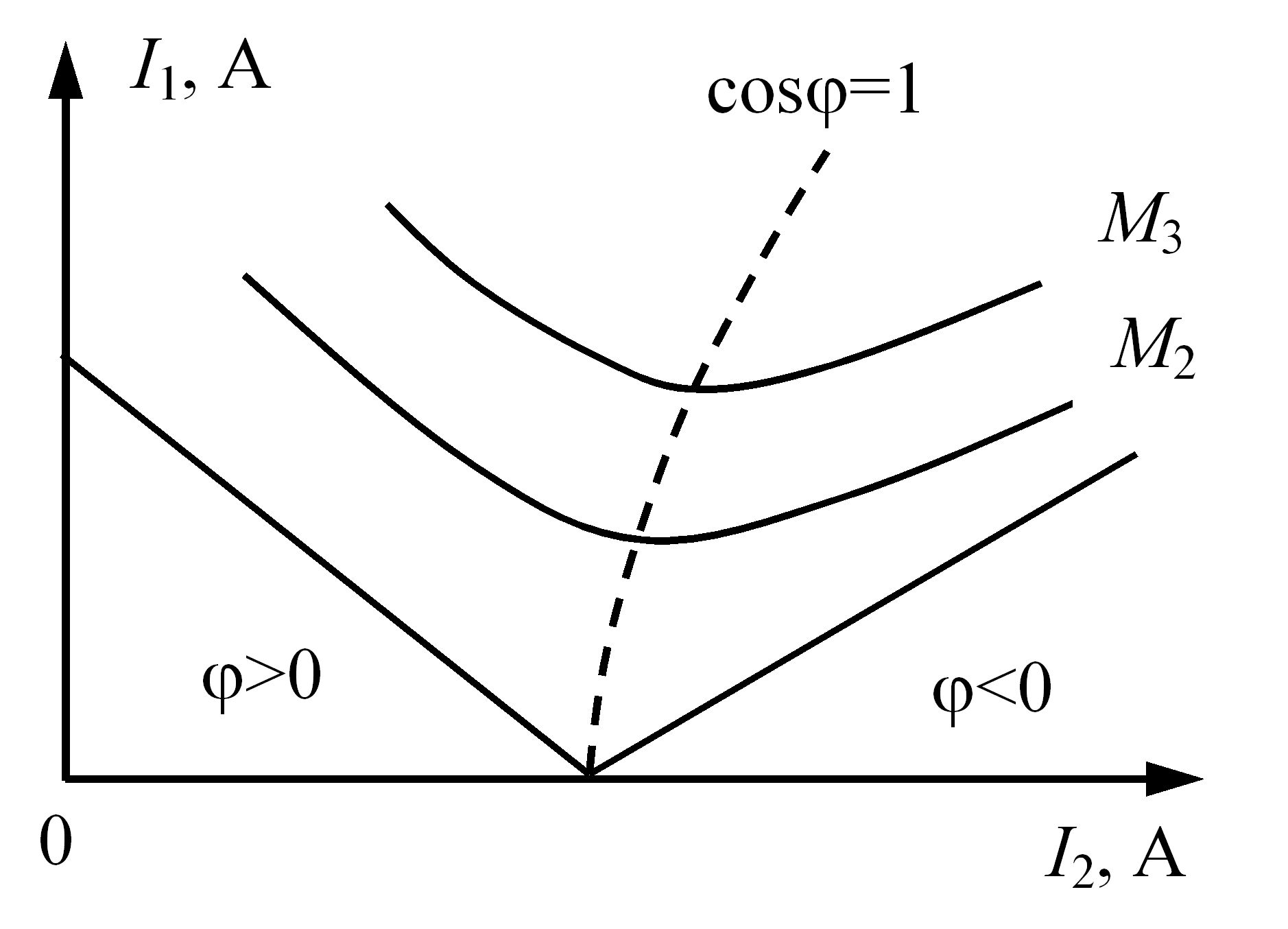
Рис. 5.49 – Зразковий вид U-подібної характеристики синхронного двигуна
Також для синхронного двигуна будують робочі характеристики:
- залежність швидкості обертання вала ротора n2 від корисної потужності на валу P2: n2 = f (P2);
- залежність обертального моменту на валу M від корисної потужності на валу P2: M = f (P2);
- залежність сили струму I1, що споживається двигуном, від корисної потужності на валу P2: I1 = f (P2);
- залежність коефіцієнта потужності cosφ1 від корисної потужності на валу P2: cosφ1 = f (P2);
- залежність ККД η від корисної потужності на валу P2: η = f (P2).
Зразковий вид робочих характеристик синхронного двигуна подано на рис. 5.50.
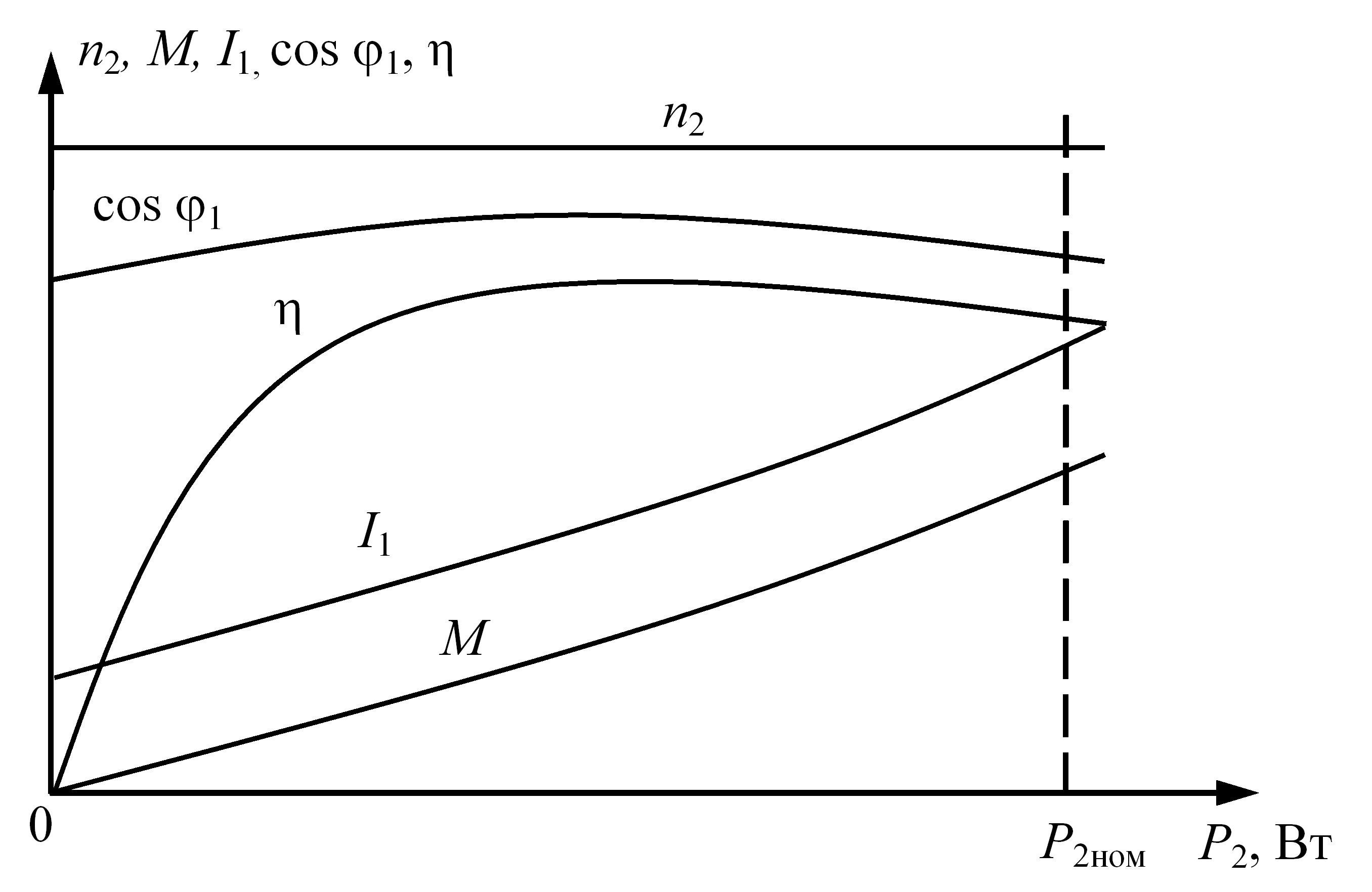
Рис. 5.50 – Зразковий вид робочих характеристик синхронного двигуна
Умовні позначення синхронних машин на електричних схемах приведено на рис. 5.51.
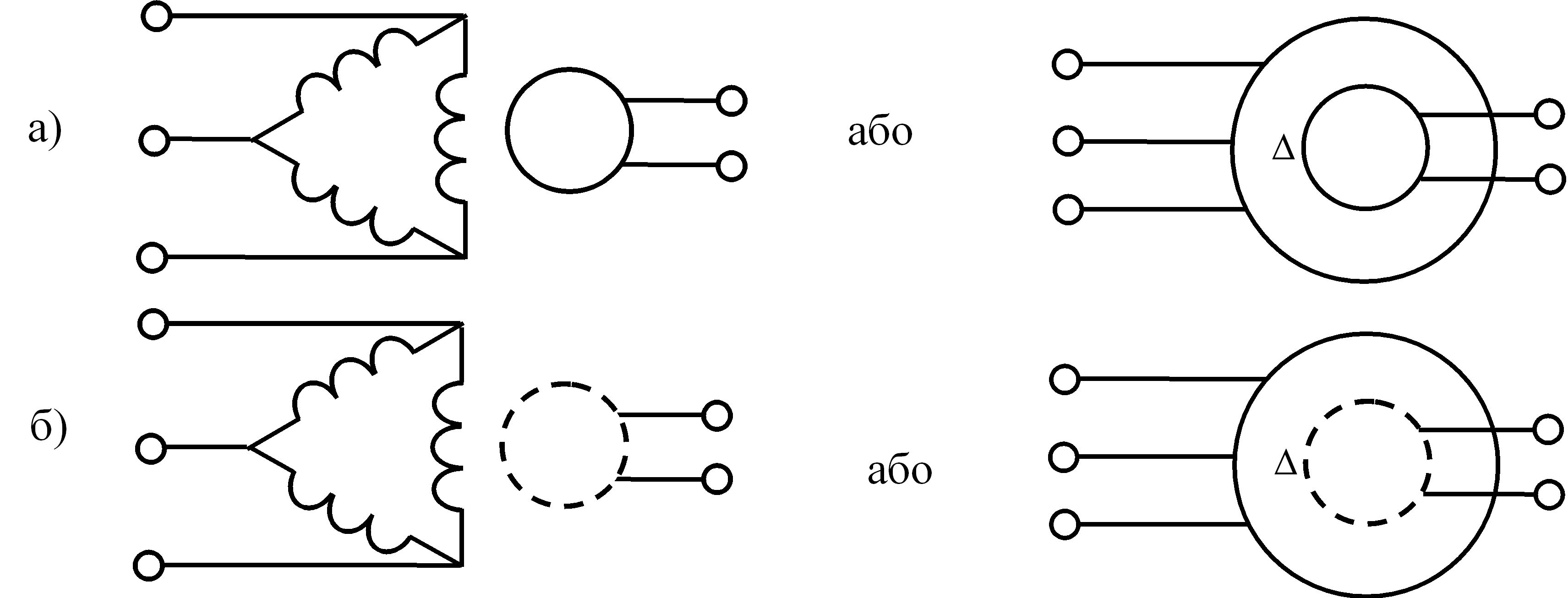
Рис. 5.51 – Умовні позначення на електричних схемах синхронних машин:
а – з неявнополюсним ротором, б – з явнополюсним ротором
Способи пуску синхронного електродвигуна. Пуск у хід синхронного двигуна шляхом безпосередньо вмикання в мережу не можливий. Пуск синхронного двигуна можливий лише за умови, що попередньо ротор буде розкручений стороннім двигуном до швидкості, близької до синхронної.
Найбільш широко застосовується асинхронний пуск синхронного двигуна. Схему пуску приведено на рис. 5.52.
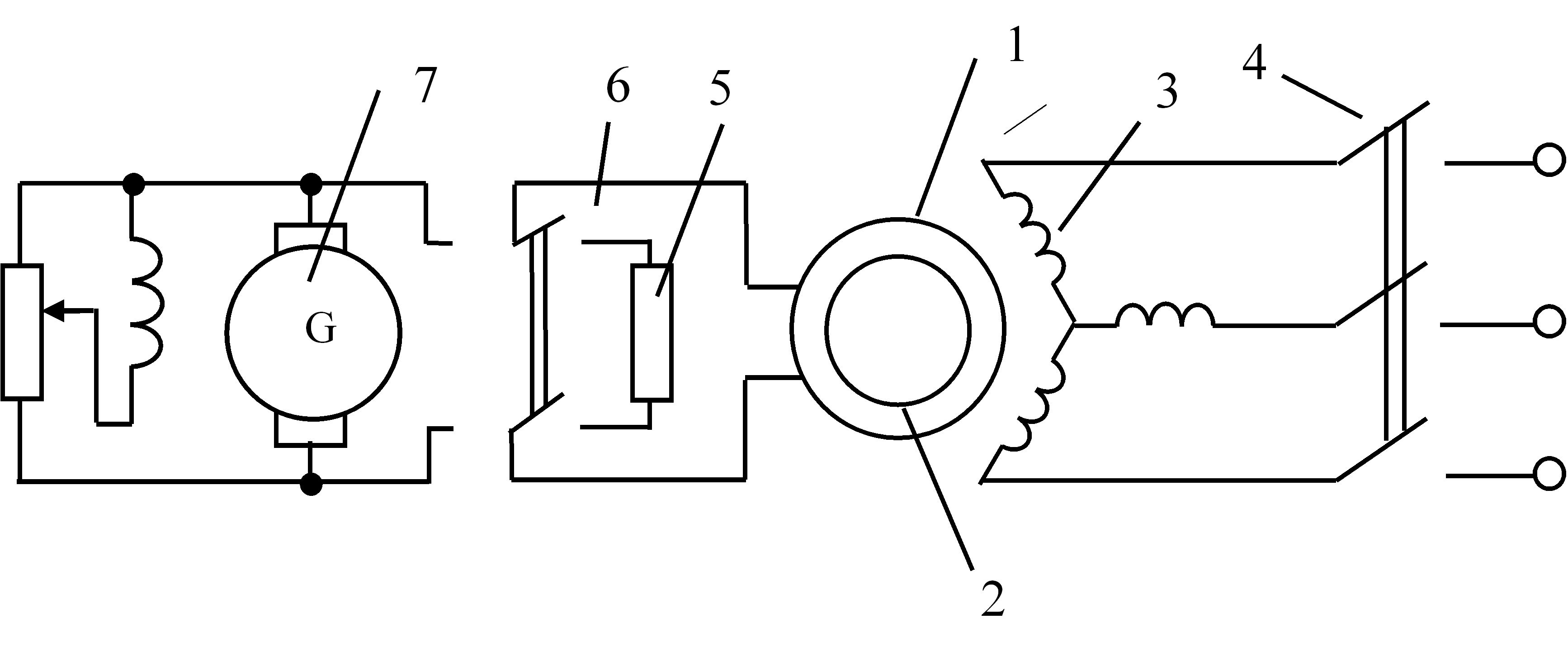
Рис. 5.52 – Схема асинхронного пуску синхронного двигуна
1 – обмотка збудження; 2 – короткозамкнена обмотка ротора; 3 – обмотка статора; 4 – рубильник; 5 – опір; 6 – перемикач; 7 – збудник (генератор постійного струму)
У випадку асинхронного пуску синхронного двигуна синхронний двигун виготовляється з додатковою короткозамкненою обмоткою 2 на зразок "білячого колеса", причому ця обмотка укладається у спеціальні пази, розташовані в полюсних наконечниках ротора. Після вмикання обмотки статора 3 у мережу у двигуні виникає обертове магнітне поле, що викликає в короткозамкненій обмотці 2 ротора струми. Ці струми створюють обертальний пусковий момент, як в асинхронному трифазному двигуні, і ротор починає обертатися. Коли ротор синхронного двигуна почне обертатися зі швидкістю, близькою до синхронної, його обмотку збудження 1 включають на постійний струм, тобто збуджують двигун, і він, як говорять, сам "впадає в синхронізм" – починає обертатися із синхронною швидкістю. При пуску обмотка збудження повинна замикатися на особливий опір 5, щоб уникнути наведення в ній великих ЕРС, небезпечних для ізоляції обмотки.
Зупинення синхронного двигуна починається зі встановлення струму збудження, що відповідає мінімальному струму статора (cosφ = 1), потім вимикають обмотки статора, а вже після цього розмикають коло збудження. Інший порядок зупинки є не припустимим.
Робота синхронного двигуна в режимі компенсатора. Синхронний компенсатор – це синхронний двигун, що працює без навантаження і служить для підвищення коефіцієнта потужності cosφ та, відповідно, підвищення ККД електростанцій.
При роботі синхронних двигунів швидкість обертання вала є постійною, а зміна струму в обмотці збудження приводить лише до зміни струму, що споживається обмоткою статора двигуна. Пояснімо це математично.
Активна електрична потужність, що споживається синхронним двигуном, визначається за формулою (5.91). За постійних потужності P1 = const та напруги U1 = const зміна сили струму I1 може відбуватися тільки за рахунок зміни cosφ1. Таким чином, за зміни сили струму збудження I1 синхронного двигуна змінюється його коефіцієнт потужності cosφ1.
Синхронний двигун у режимі компенсатора працює в режимі перезбудження ( cosφ < 0) для компенсації індуктивної складової струму, яка виникає при роботі парку асинхронних двигунів.
У порівнянні з конденсаторними компенсаторами, які також виконують функцію компенсаторів індуктивної складової струму (параграф 3.7), синхронні компенсатори є дешевшими, мають менші габарити та масу. Але конденсатори не споживають активну потужність.
Крім того, компенсатор виконує функцію стабілізатора напруги в електричній мережі. Якщо напруга в мережі зменшується, то компенсатор споживає реактивний випереджальний струм. Якщо напруга підвищується, то компенсатор споживає реактивний запізний струм.
Конструктивно синхронний двигун, призначений для роботи в якості компенсатора, має більш легку механічну конструкцію та підвищений переріз обмотки збудження, яка призначена для постійної роботи в режимі перезбудження.
Переваги та недоліки синхронних машин. Перевагами синхронних машин є: постійна швидкість обертання вала за змін навантаження; незалежність частоти ЕРС від навантаження; високий ККД; високий коефіцієнт потужності; можливість роботи в якості ємності (компенсатора).
Недоліками синхронних машин є: необхідність використання постійного струму для збудження ротора; складний пуск; відсутність пускового моменту; відсутність можливості регулювання швидкості обертання вала; при перевантаженні синхронність порушується і двигун зупиняється; труднощі при реверсуванні.
Пожежна небезпека синхронних машин. Пожежа небезпека синхронних електричних машин зумовлена наявністю контактних з’єднань (щітка – контактне кільце). Але за номінального навантаження, на відміну від електричних машин постійного струму, інтенсивність іскріння щіткового вузла є значно меншою.
Для синхронних електричних машин не є допустимою значна зміна навантаження. При перевантаженні можлива раптова зупинка вала ротора, що може призвести до порушення нормального ходу технологічного процесу, який забезпечується синхронним двигуном.
Як і для інших видів електричних машин, пожежна небезпека синхронних машин значно збільшується при погіршенні умов охолодження. Особливу небезпеку являє собою воднева система охолодження потужних синхронних генераторів. Водень – горючий газ, що має мінімальну енергію запалювання – лише 0,017 мДж та максимальний тиск вибуху 730 кПа. Спроможний створювати гримучу суміш.
Також потребують своєчасного технічного обслуговування підшипникові вузли та механічні кріплення.