6.4. Принцип дії вимірювальних приладів різних систем
Під системою приладу розуміють принцип дії вимірювального приладу. Існує значна кількість систем приладів. У більшості електровимірювальних приладів рухома частина рухається внаслідок створення обертального моменту, який виникає внаслідок взаємодії магнітних або електричних полів. Момент, що протидіє обертальному, може створюватися механічною силою (наприклад, пружиною) або електромагнітною силою (логометричний прилад).
Прилади магнітоелектричної системи. Прилади магнітоелектричної системи працюють за принципом взаємодії магнітного поля нерухомого постійного магніту з магнітним полем провідника зі струмом, що проходить по рухомій котушці.
Принцип дії приладу магнітоелектричної системи пояснюється на рис. 6.11.
Вимірювальний механізм приладу складається з нерухомого підковоподібного магніту 1 з полюсними закінченнями N та S, нерухомого сталевого циліндра 2, рухомої котушки 3, стрілки і спіральної пружини 4. Струм у котушку подається через дві спіральні пружини, що ізольовані від осі. Ці пружини також призначені для створення протидіючого моменту. Обертальний момент, що діє на рухому частину вимірювального механізму, і кут повороту стрілки є пропорційними величині вимірюваного струму. Тому шкала магнітоелектричних приладів є рівномірною.
У приладів магнітоелектричної системи висока чутливість, велика точність, мала чутливість до зовнішніх магнітних полів, швидке заспокоєння, мале споживання електричної енергії.
Недоліками приладів магнітоелектричної системи є робота лише за постійного струму, слабка перевантажувальна здатність, порівняно висока вартість.
Магнітоелектрична система застосовується в амперметрах та вольтметрах постійного струму.
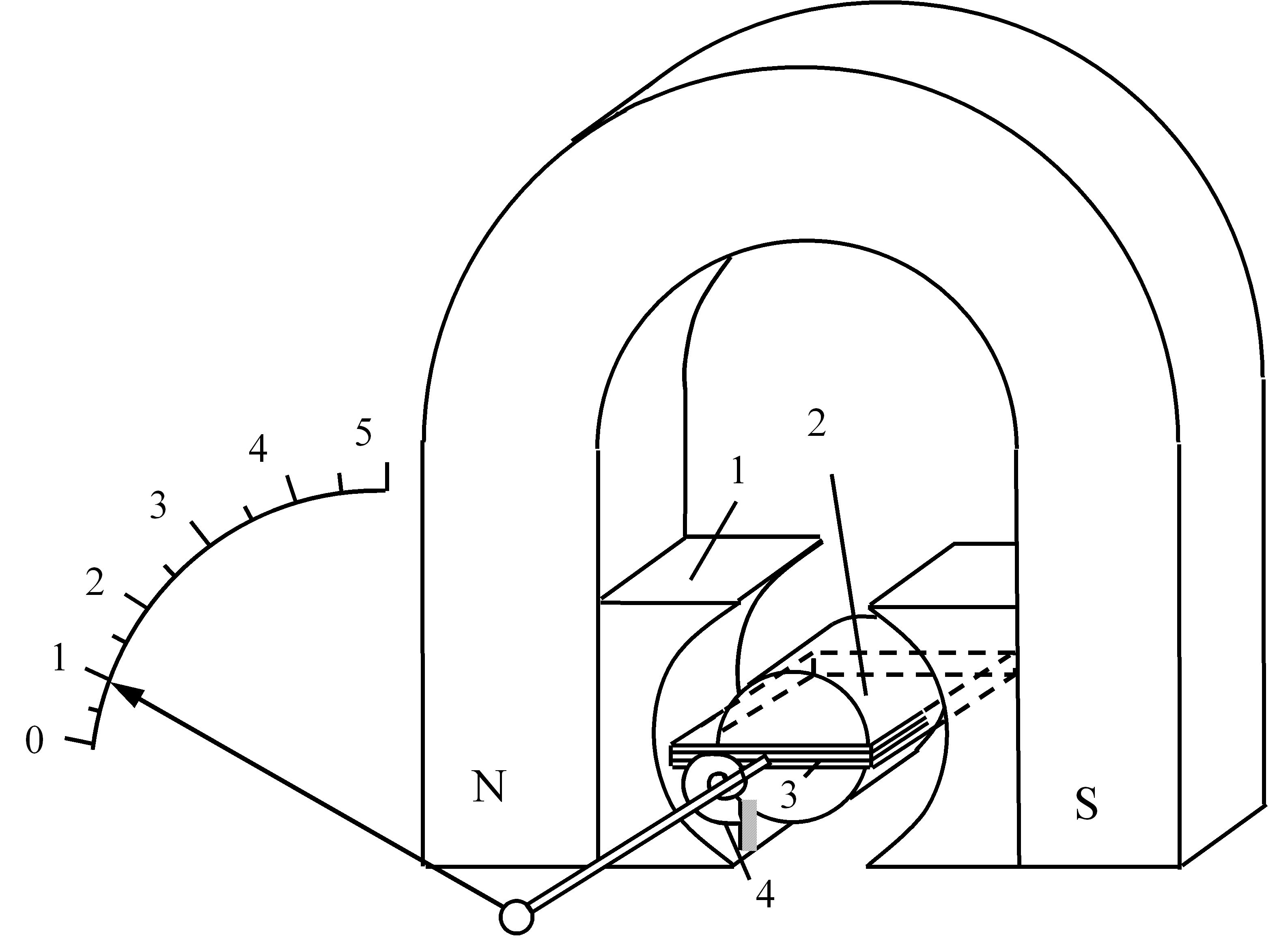
Рис. 6.11 – Принцип дії приладу магнітоелектричної системи
1 – підковоподібний магніт; 2 – нерухомий сталевий циліндр; 3 – рухома котушка;
4 – спіральна пружина
При з’єднанні магнітоелектричного механізму і напівпровідникового випрямляча одержуємо детекторний прилад. При з’єднанні механізму з термопарами одержуємо термоелектричний прилад.
Прилади електромагнітної системи. Прилади електромагнітної системи мають нерухому котушку, через обмотки якої протікає електричний струм, що вимірюється, та розташовану на осі зі стрілкою феромагнітну пластину (пелюсток). При протіканні електричного струму через нерухому котушку котушка створює магнітне поле, яке втягує пелюсток всередину котушки.
Принцип дії приладу електромагнітної системи пояснюється на рис. 6.12.
Вимірювальний механізм приладу складається з котушки 1 з вузькою щілиною усередині, осердя у виді пелюстка з м’якої сталі 2, що, повертаючись навколо осі, може входити в щілину котушки. З віссю пов’язані стрілка, поршень повітряного заспокоювача і спіральна пружина, що створює протидіючий момент. При протіканні струму по котушці осердя втягується усередину котушки із силою, прямо пропорційною квадрату сили струму.
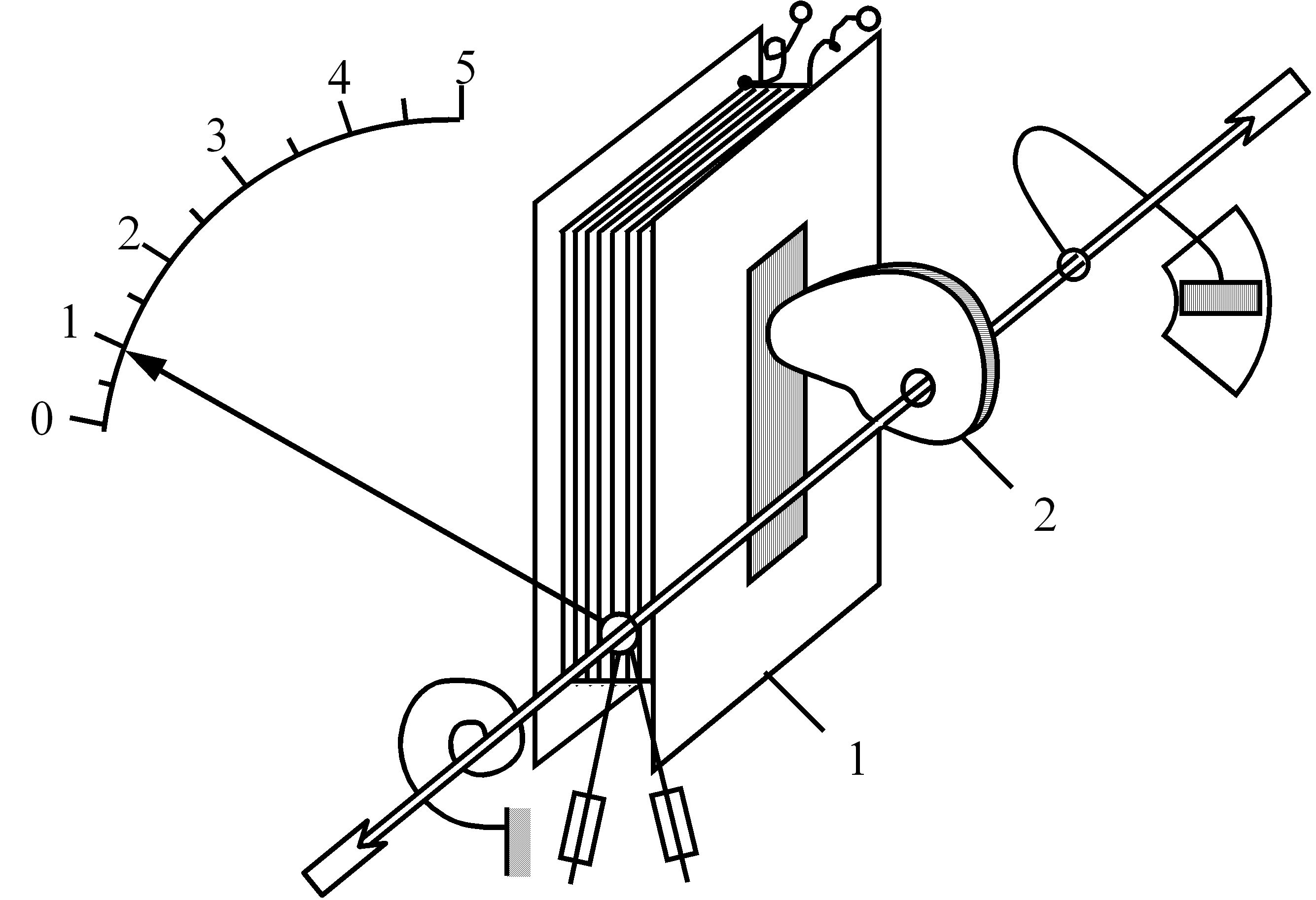
Рис. 6.12 – Принцип дії приладу електромагнітної системи
1 – нерухома котушка; 2 – пелюсток із м’якої сталі
Обертальний момент приладу пропорційний квадрату сили струму і зміні індуктивності системи при повороті рухомої частини.
Прилади електромагнітної системи мають нерівномірну шкалу, їх показання залежать від впливу зовнішніх магнітних полів і мають малу точність.
До позитивних якостей приладів електромагнітної системи слід віднести простоту конструкції, стійкість до перевантажень, придатність до роботи на постійному та змінному струмах, дешевину, можливість виготовлення приладів, розрахованих на великі струми.
Недоліками приладів електромагнітної системи є нерівномірність шкали, особливо в початковій частині, власне споживання електричної енергії, залежність показань від впливу зовнішніх магнітних полів.
Електромагнітна система застосовується в щитових амперметрах та вольтметрах змінного струму.
У приладах електромагнітної системи для усунення впливу зовнішніх магнітних полів може застосовуватися астатичний вимірювальний механізм. Астатичний вимірювальний механізм складається з двох нерухомих обмоток та двох осердь на одній осі. Обмотки вмикаються послідовно таким чином, щоб їх магнітні потоки були зустрічними, а моменти, що діють на осердя – узгодженими. При цьому зовнішній магнітний потік посилює обертальний момент одного осердя і послаблює обертальний момент другого осердя. Загальний обертальний момент не залежить від зовнішнього магнітного поля.
Прилади електродинамічної системи. Робота приладів електродинамічної системи ґрунтується на взаємодії магнітних полів провідників зі струмами: два провідники із протилежно спрямованими струмами взаємно відштовхуються, з однаково спрямованими струмами – притягуються.
Принцип дії приладу електродинамічної системи пояснюється на рис. 6.13.
Вимірювальний механізм складається з двох котушок: нерухомої і рухомої, розташованої всередині нерухомої котушки. Рухома котушка розташована на одній осі зі стрілкою, крилом повітряного заспокоювача і двома спіральними пружинами. При проходженні струму Iн по нерухомій котушці і струму Ip по рухомій котушці між ними виникає сила взаємодії; при цьому на рухому котушку діє пара сил, що викликає її поворот. За постійного струму момент сил і кут повороту рухомої котушки є пропорційними добутку струмів у котушках.
Електродинамічна система застосовується в амперметрах, вольтметрах та ватметрах змінного струму. Залежно від призначення приладів, їх котушки з’єднуються по-різному:
– в амперметрах, розрахованих на малий струм (до 0,5 А), обидві котушки вмикаються послідовно, а для струму більше 0,5 А – паралельно;
– у вольтметрах обидві котушки завжди вмикаються послідовно;
─ у ватметрах котушки не з’єднані електрично і мають по дві зовнішні клеми для підключення до мережі. Відносно приймача нерухома котушка (струмова котушка) включається послідовно, а рухома котушка (котушка напруги) – паралельно.
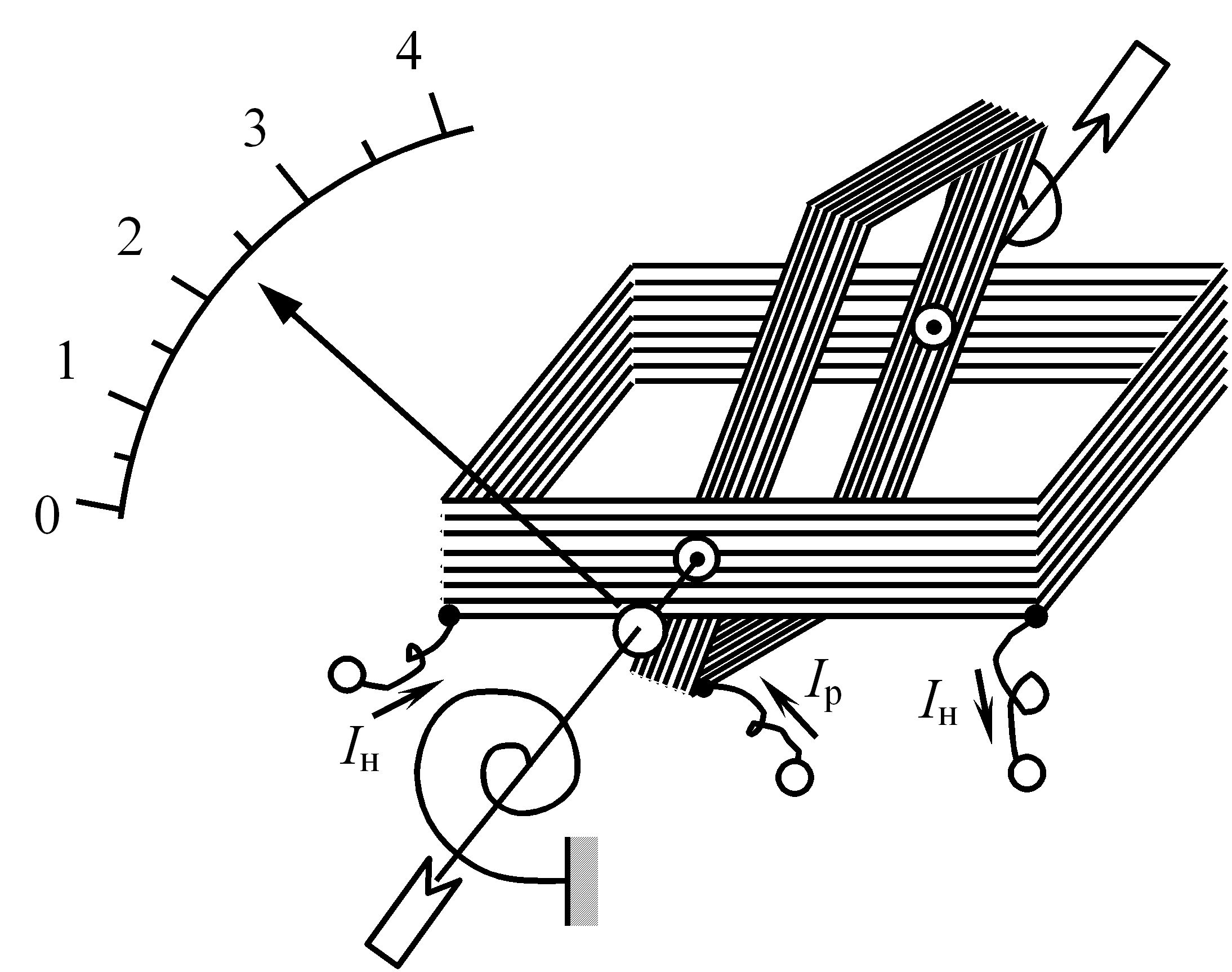
Рис. 6.13 – Принцип дії приладу електродинамічної системи
До позитивних якостей приладів електродинамічної системи слід віднести їх високу точність і можливість застосування в колах змінного і постійного струму.
Недоліки приладів електродинамічної системи: через складність виготовлення прилади мають високу вартість, через погані умови охолодження і власне споживання енергії електродинамічні механізми не повинні перевантажуватися.
Прилади електростатичної системи. Електростатична система вимірювального приладу є різновидністю плоского конденсатора. Відхилення рухомої частини є наслідком зміни ємності конденсатора.
Принцип дії приладу електростатичної системи пояснюється на рис. 6.14.
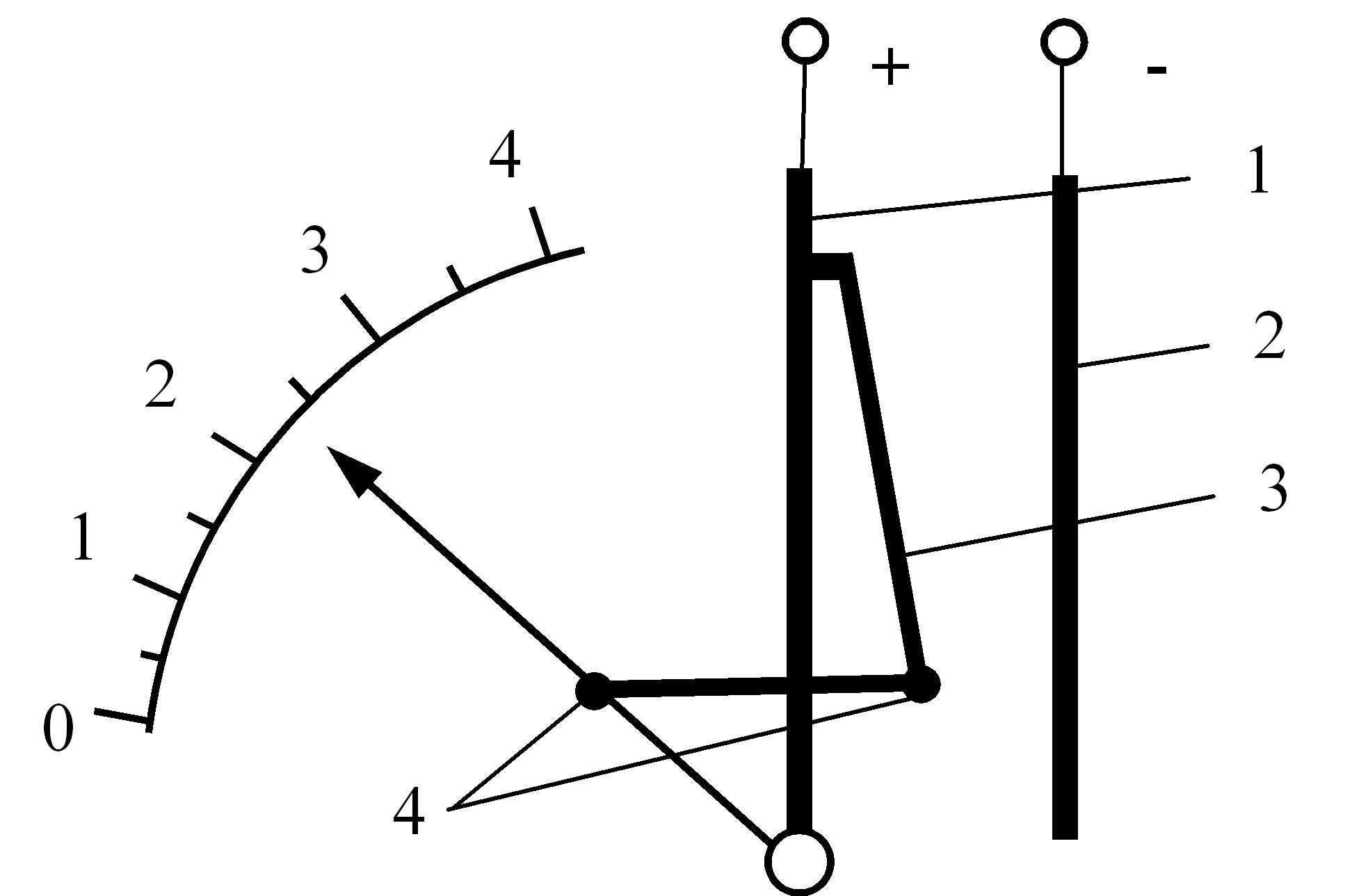
Рис. 6.14 – Принцип дії приладу електростатичної системи
1, 2 – нерухомі пластини; 3 – рухома пластина; 4 – шарніри
Вимірювальний механізм складається з двох металевих ізольованих пластин 1 та 2, заряджених різнойменно, та рухомої пластини 3. До рухомої пластини 3 приєднано покажчик. Під дією напруги рухома пластина 3 відштовхується від пластини 1 та притягується до пластини 2. Покажчик показує зміну напруги.
Електростатична система застосовується у вольтметрах постійного та змінного струму.
До позитивних якостей приладів електростатичної системи слід віднести нечутливість до зовнішніх магнітних полів, можливість безпосереднього виміру великих напруг, мале споживання електричної енергії.
Недоліком приладів електростатичної системи є їх низька чутливість.
Прилади феродинамічної системи. Феродинамічна система є різновидністю електродинамічної системи.
Принцип дії приладу феродинамічної системи пояснюється на рис. 6.15.
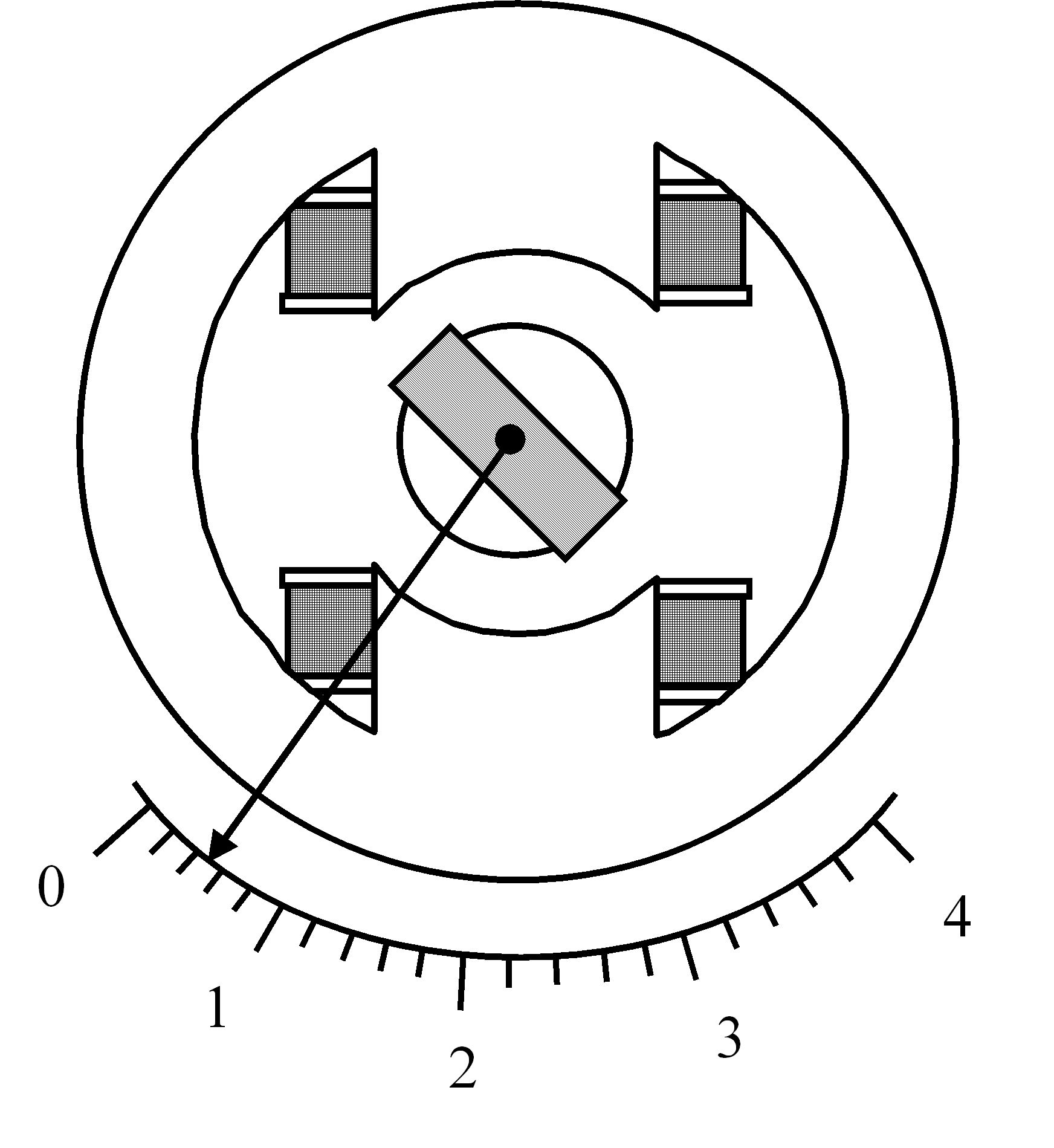
Рис. 6.15 – Принцип дії приладу феродинамічної системи
Для посилення магнітного поля обмотку нерухомої котушки розташовують на стальному осерді, а рухома котушка обертається навколо нерухомого циліндричного осердя (як у приладі магнітоелектричної системи). При такому виконанні прилади захищені від впливу зовнішніх магнітних полів.
Феродинамічна система застосовується в щитових ватметрах.
Прилади індукційної системи. Принцип дії приладів індукційної системи базується на взаємодії магнітного поля, що обертається, з вихровими струмами, що індукуються цим полем у рухомому металевому диску (роторі). Магнітне поле, що обертається, отримується за допомогою двох змінних магнітних потоків, зсунутих у просторі і за фазою один відносно другого.
Принцип дії приладу індукційної системи пояснюється на рис. 6.16.
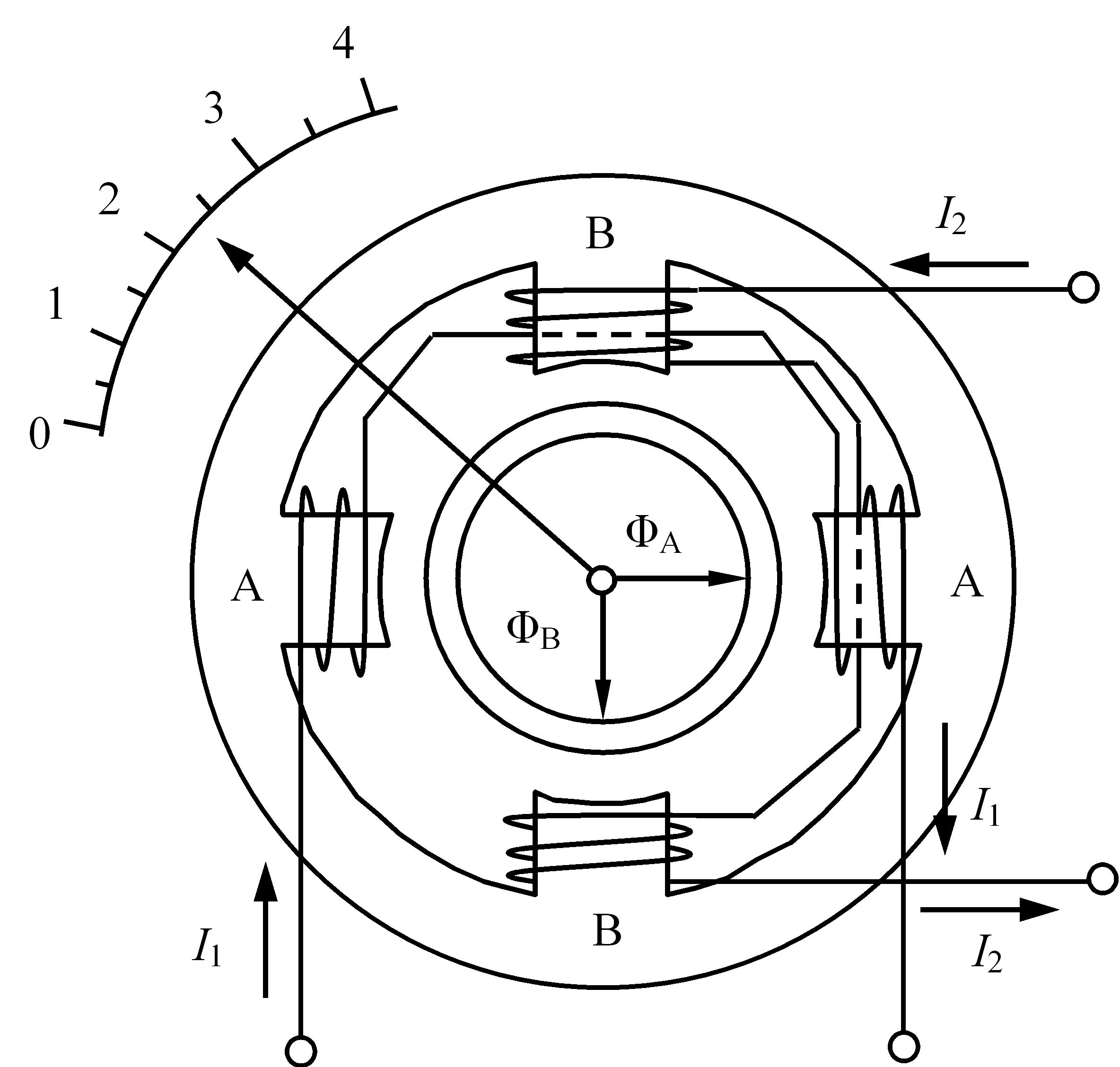
Рис. 6.16 – Принцип дії приладу індукційної системи
Струми I1 та I2 створюють два змінних магнітних потоки ФА та ФВ полюсів АА та ВВ, осі яких є взаємно перпендикулярними. Якщо потоки ФА та ФВ зсунуто за фазою, то створюється магнітне поле, що обертається. Ротор зі стрілкою намагається почати обертатися. Протидіючий момент створюється пружиною (на рис. 6.16 не показана).
Робота приладів індукційної системи не залежить від впливу зовнішніх магнітних полів. Прилади є стійкими до перевантажень, тривкими за конструкцією і надійними в роботі.
Прикладом приладу індукційної системи є однофазний індукційний лічильник електричної енергії. Розглянемо його принцип дії (рис. 6.17).
Алюмінієвий диск знаходиться у змінному магнітному полі. Обмотка електромагніту МU ввімкнена на напругу електричної мережі змінного струму, обмотка електромагніту МI ввімкнена послідовно в коло навантаження. Магнітний потік ФU є пропорційним напрузі мережі. Магнітний потік ФI є пропорційним струму навантаження мережі. Під дією обертального моменту алюмінієвий диск обертається, гальмування диска здійснюється постійним магнітом M. На осі диска розташовано обліковий механізм електричної енергій (на рис. 6.17 не показаний).
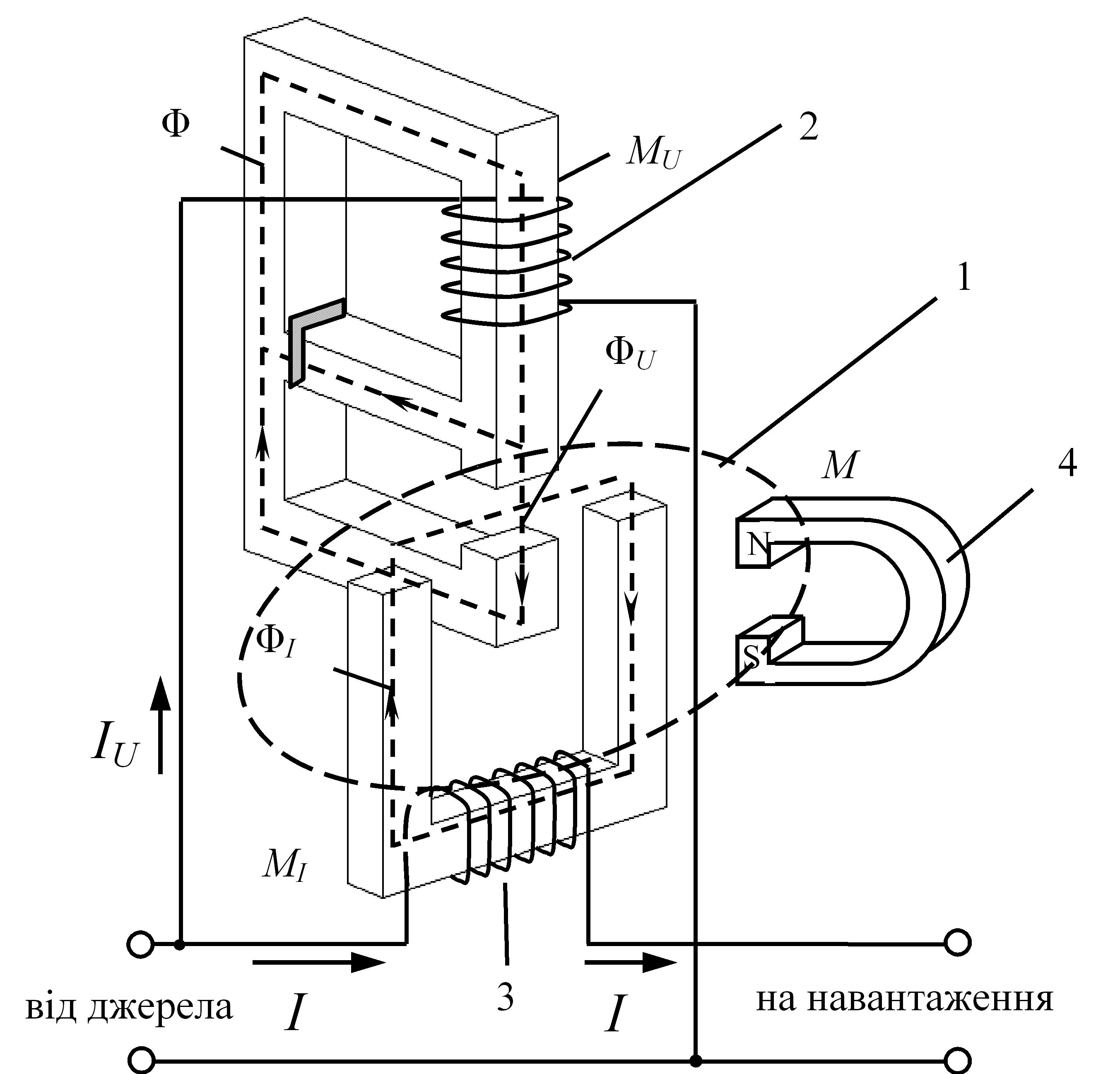
Рис. 6.17 – Принцип дії однофазного індукційного лічильника електричної енергії
1 – алюмінієвий диск; 2 – обмотка електромагніту, ввімкнена на напругу електричної мережі; 3 – обмотка електромагніту, ввімкнена послідовно в коло навантаження; 4 – постійний магніт
Порядок вмикання однофазного індукційного лічильника електричної енергії показано на рис. 6.18.
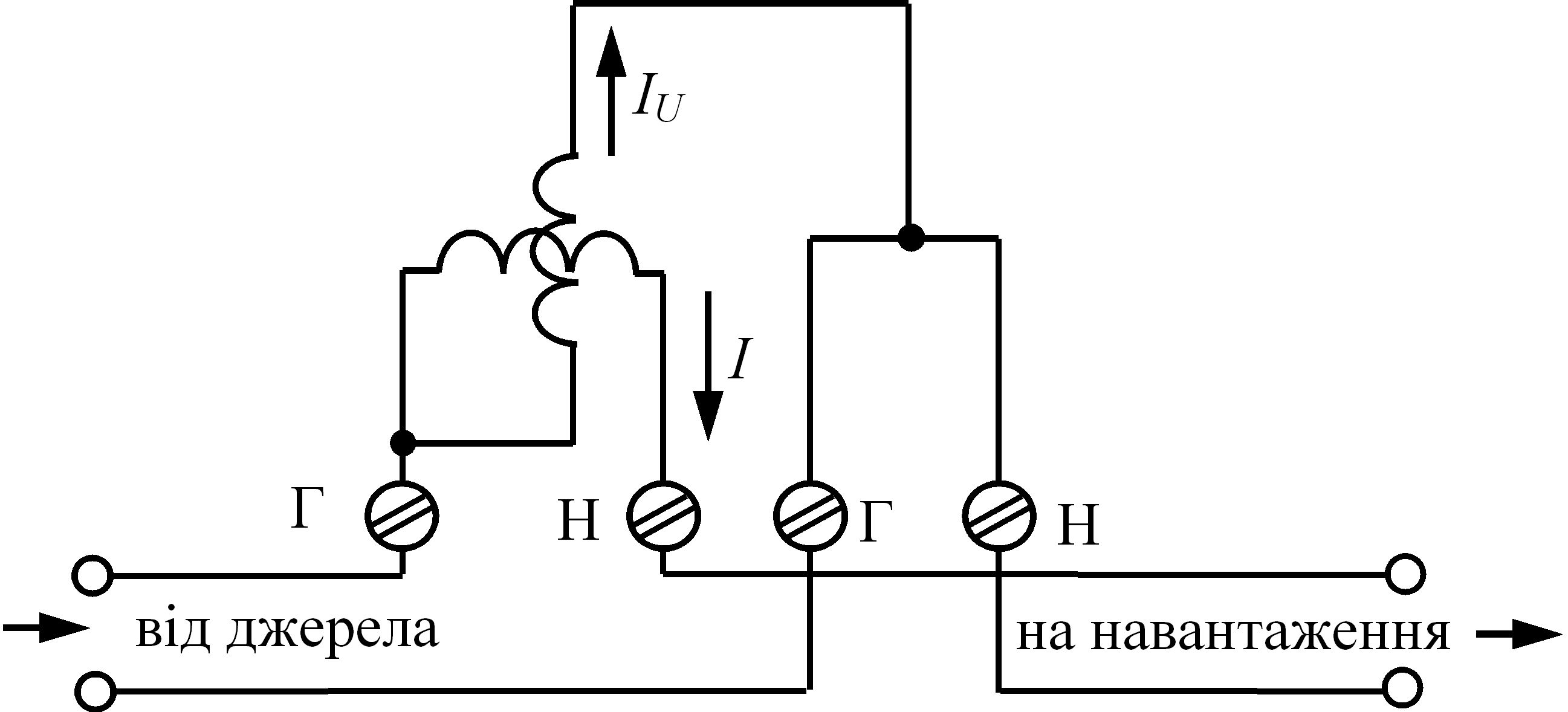
Рис. 6.18 – Порядок вмикання однофазного індукційного лічильника електричної енергії
Осцилограф. Для реєстрації величин, що швидко змінюються, застосовують електронно-променевий осцилограф. Спрощена блок-схема електронно-променевого осцилографа подана на рис. 6.19.
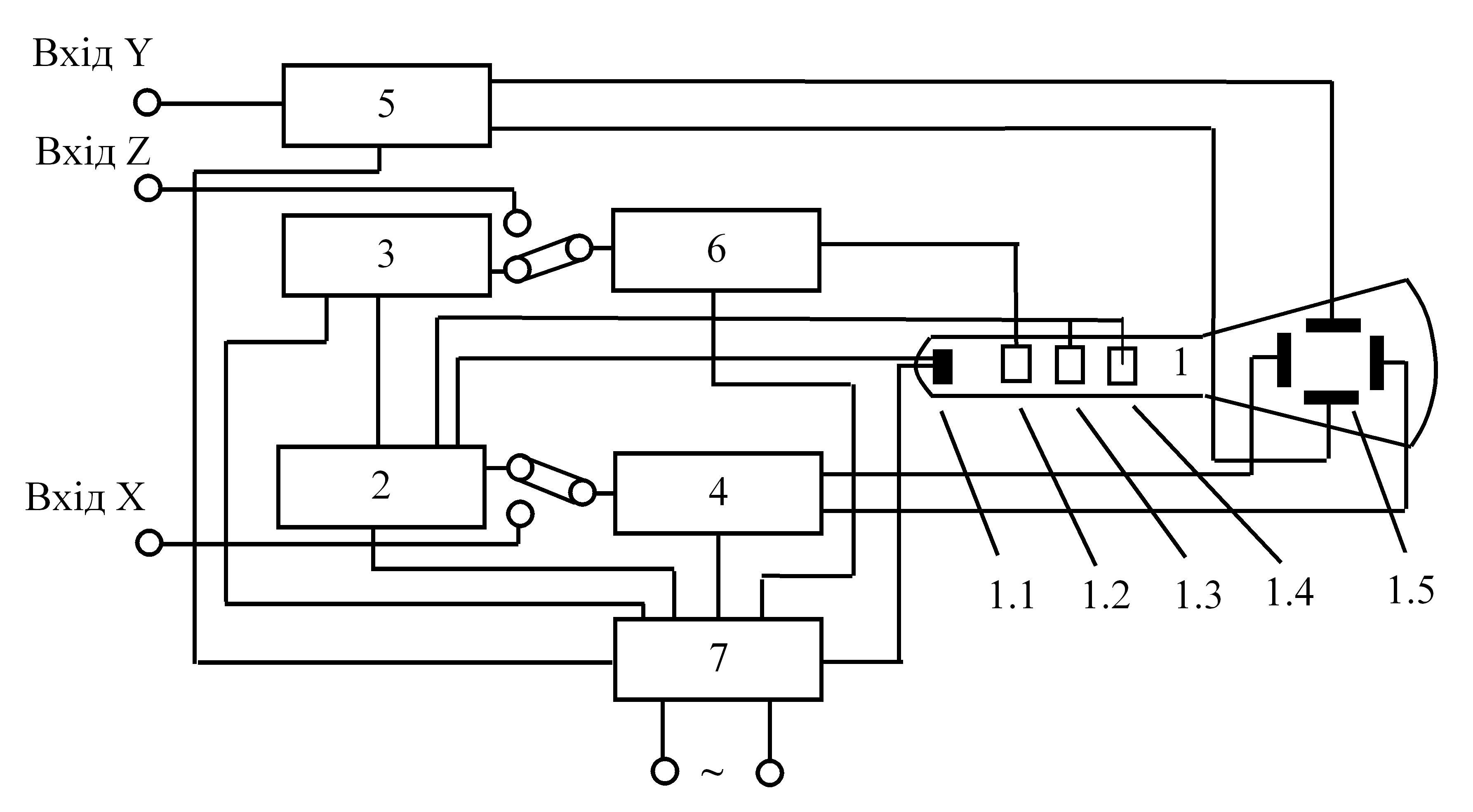
Рис. 6.19 – Спрощена блок-схема електронно-променевого осцилографу
1 – електронно-променева трубка (1.1 – катод, 1.2 – електрод керування, 1.3 – перший анод, 1.4 – другий анод, 1.5 – відхилювальні пластини); 2 – генератор розгортки; 3 – генератор відміток часу; 4 – підсилювач горизонтального відхилення; 5 – підсилювач вертикального відхилення; 6 – підсилювач яскравості; 7 – блок живлення
Основною складовою частиною електронно-променевого осцилографа є електронно-променева трубка 1, в якій за допомогою електронного прожектора (електронної пушки) формується вузький електронний промінь, який відхиляється у двох взаємно-перпендикулярних напрямках. Відхилення променя здійснюється за допомогою електричних полів, що створюються двома парами відхилювальних пластин 1.5. Екран електронно-променевої трубки покритий шаром люмінофору, на якому під дією електронного променя з’являється світлова пляма. При відхиленнях променя світлова пляма рухається по екрану, що дає світлове відображення досліджуваного процесу. Прожектор (електронна пушка) складається з катода 1.1, електрода керування 1.2 та двох анодів 1.3 та 1.4.
Генератор розгортки 2 виробляє напругу, що змінюється за певним законом у часі і є необхідною для дослідження процесів, що швидко змінюються. Генератор відміток часу 3 виробляє серію періодичних сигналів для калібрування масштабу часу. Підсилювачі горизонтального відхилення 4, вертикального відхилення 5 та яскравості 6 підсилюють напругу до значень, необхідних для нормального керування променем осцилографа.
Електронно-променевий осцилограф може працювати у наступних основних режимах:
- режим внутрішньої синхронізації;
- режим зовнішньої синхронізації;
- автоматичний режим;
- режим спеціальної розгортки.
Електронно-променевий осцилограф має основні органи керування:
- регулювання яскравості променя (здійснюється зміною напруги на електроді керування електронно-променевої трубки);
- фокусування променя (здійснюється зміною напруги на першому аноді прожектора (електронної пушки) відносно другого анода);
- регулювання променя по горизонталі та вертикалі (здійснюється подаванням постійної напруги на відповідні пари відхилювальних пластин);
- керування швидкістю розгортки (здійснюється зміною параметрів генератора розгортки), звичайно здійснюється двома ручками "плавно" та "грубо";
- регулювання чутливості відхилення по горизонталі та вертикалі (здійснюється регулюванням параметрів підсилювачів горизонтального та вертикального відхилення).
Поняття про цифрові вимірювання параметрів електричних кіл. Цифрові вимірювальні прилади побудовані на елементах мікропроцесорної техніки. Цифрові вимірювальні прилади мають високу точність та чутливість вимірювання, є швидкісними, є можливість їх підключення до інших цифрових приладів. Недоліками цифрових вимірювальних приладів є їх складність, висока вартість виготовлення та ремонту.
Принципи електричних вимірювань неелектричних величин. Вимірювання неелектричних величин (наприклад, рівня рідини, температури тощо) здійснюється шляхом перетворення неелектричної величини в електричну величину, яка є залежною від неї і вимірюванням якої можна визначити й неелектричну величину.
Перетворювач – елемент вимірювального пристрою, який здійснює перетворення неелектричної величини в електричну. Розрізняють перетворювачі параметричні та генераторні.
Параметричний перетворювач – перетворювач, в якому неелектрична величина перетворюється у певний електричний параметр електричного кола (опір, ємність конденсатора, індуктивність котушки індуктивності тощо).
Генераторний перетворювач – перетворювач, в якому неелектрична величина перетворюється в ЕРС.
Види параметричних перетворювачів:
- реостатний перетворювач – здійснюється зміна величини опору реостата залежно від положення його рухомого контакту;
- термочутливий перетворювач – здійснюється зміна величини опору напівпровідникових резисторів залежно від температури;
- тензометричний перетворювач – здійснюється зміна величини опору матеріалів залежно від механічних напруг, що виникають, наприклад, при вигинанні (біметалічна пластина тощо);
- електромагнітний перетворювач – здійснюється зміна параметрів електромагнітного поля залежно від параметрів об’єкта вимірювання;
- ємнісний перетворювач – здійснюється зміна величини ємності конденсатора залежно, наприклад, від взаємного розташування пластин конденсатору;
- індуктивний перетворювач – здійснюється зміна величини індуктивності котушки індуктивності в залежності, наприклад, від положення осердя або взаємного розташування двох котушок;
- перетворювач вихрових струмів – інтенсивність генерації вихрових струмів в осерді, наприклад, котушки індуктивності, залежить від електропровідності. Чим більше інтенсивність генерації вихрових струмів, тм менше опір кола збудження.
Види генераторних перетворювачів:
- п’єзоелектричний перетворювач – у кристалі, наприклад, кварцу виникає ЕРС під зовнішнім механічним впливом, наприклад, тиском на поверхню;
термоелектричний перетворювач – ЕРС термопари залежить від різниці температур її частин.